


















утверждаю
Первый проректор СПГГИ (ТУ)
_____________ профессор Н.В. пашкевич
«____» _________________ 2001 г.
ТЕСТЫ к экзамену по учебной дисциплине
«Системы управления электроприводов»
для студентов специальности 18.04.00 - «Электропривод и автоматика промышленных установок и технологических комплексов»
направления 65.45.00 - «Электротехника, электромеханика и электротехнологии»
Вариант I
Составитель д.т.н., проф.
№ |
Вопросы |
Варианты ответов |
|
1 |
Дискретная система программного управления (ДСПУ) с небольшим объемом логических функций и особо жесткими требованиями по помехоустойчивости должна создаваться на базе аппаратных средств… |
1. программируемых контроллеров 2. программируемых логических матриц 3. релейно-контакторных систем (РКС) 4. магнитных усилителей 5. программируемых запоминающих устройств |
|
2 |
Дискретная система программного управления (ДСПУ) при большом объеме логической информации, сложных алгоритмах и гибкой структуре должна создаваться на базе аппаратных средств… |
1. магнитных усилителей 2. релейно-контакторных систем (РКС) 3. программируемых логических матриц 4. программируемых контроллеров 5. программируемых запоминающих устройств |
|
3 |
Общей функциональной моделью ДСПУ как автоматического устройства логического преобразования управляющих сигналов является… |
1. операционный усилитель 2. конечный автомат 3. магнитный усилитель 4. автоматический выключатель 5. концевой выключатель |
|
4 |
Конечный автомат, имеющий в своем составе элемент памяти, является… |
1. комбинационным автоматом 2. защитным автоматом 3. последовательным (многотактным) автоматом 4. контрольным автоматом 5. симплексным автоматом |
|
5 |
Логическая функция
|
1. конъюнктивной нормальной форме (КНФ) 2. форме отрицаний 3. дизъюнктивной нормальной форме (ДНФ) 4. форме секвенций 5. форме исключений |
|
|
Приведенная таблица истинности соответствует логическому элементу… |
1. «НЕ» 2. «И» 3. «ИЛИ» 4. «эквивалентность» 5. «ИЛИ–НЕ» |
|
7 |
Для абстрактного синтеза алгоритма ДСПУ электропривода наиболее целесообразно использование метода… |
1. таблиц переходов 2. циклограмм 3. графов 4. конвергенций 5. исключений |
|
|
Релейно-контакторная схема ДСПУ имеет следующий вид. Определить соответствующую логическую функцию. |
1. p = x1×x2 + y1×y2; q = x1×x2 + y 2. p = (x1 + y1)(x2 + y2); q = (x1 + y)x2 3. p = x1 + x2 + y1 + y2; q = x1 + y + x2 4. p = x1×x2×y1×y2; q = x1×y×x2 5. p = x1×y1 + x2×y2; q = x1×y + x2 |
|
|
Логическая функция y = (x1 + x2)×q реализуется схемой на дискретных логических элементах… |
1. 2. 3. 4. 5. |
|
|
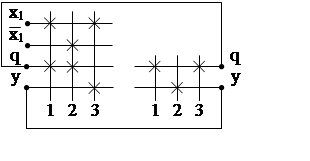
Программируемая логическая матрица (ПЛМ) запрограммирована следующим образом. Реализуемая логическая функция соответствует выражению… |
1. y = x1 + q; q = x1×y +q 2. y = x1 + y; q = x1×y 3. y = x1×q; q = x1×(q + y) 4. y = x1 + q; q = x1×q 5. y = x1×q; q = x1×y |
|
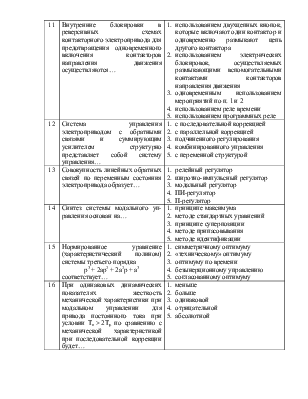
11 |
Внутренние блокировки в реверсивных схемах контакторного электропривода для предотвращения одновременного включения контакторов направления движения осуществляются… |
1. использованием двухцепных кнопок, которые включают один контактор и одновременно размыкают цепь другого контактора 2. использованием электрических блокировок, осуществляемых размыкающими вспомогательными контактами контакторов направления движения 3. одновременным использованием мероприятий по п. 1 и 2 4. использованием реле времени 5. использованием программных реле |
|
12 |
Система управления электроприводом с обратными связями и суммирующим усилителем структурно представляет собой систему управления… |
1. с последовательной коррекцией 2. с параллельной коррекцией 3. подчиненного регулирования 4. комбинированного управления 5. с переменной структурой |
|
13 |
Совокупность линейных обратных связей по переменным состояния электропривода образует… |
1. релейный регулятор 2. широтно-импульсный регулятор 3. модальный регулятор 4. ПИ-регулятор 5. П-регулятор |
|
14 |
Синтез системы модального управления основан на… |
1. принципе максимума 2. методе стандартных уравнений 3. принципе суперпозиции 4. методе припасовывания 5. методе идентификации |
|
15 |
Нормированное уравнение (характеристический полином) системы третьего порядка р3 + 2ар2 + 2а2р + а3 соответствует… |
1. симметричному оптимуму 2. «техническому» оптимуму 3. оптимуму по времени 4. безынерционному управлению 5. согласованному оптимуму |
|
16 |
При одинаковых динамических показателях жесткость механической характеристики при модальном управлении для привода постоянного тока при условии Тя > 2Тμ по сравнению с механической характеристикой при последовательной коррекции будет… |
1. меньше 2. больше 3. одинаковой 4. отрицательной 5. абсолютной |
|
|
На приведенной схеме изображен аналоговый регулятор типа… |
1. ПИД-регулятор 2. П-регулятор 3. ПИ-регулятор 4. релейный регулятор 5. И-регулятор |
|
18 |
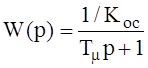
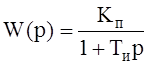
Передаточная функция
|
1. И-регулятора 2. П-регулятора 3. релейного регулятора 4. ПИ-регулятора 5. ПИД-регулятора |
|
19 |
Нормированное уравнение (характеристический полином) системы второго порядка р2
+ соответствует… |
1. «техническому» оптимуму 2. симметричному оптимуму 3. оптимуму по времени 4. безынерционному управлению 5. согласованному оптимуму |
|
20 |
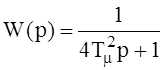
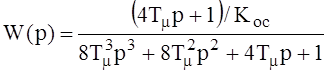
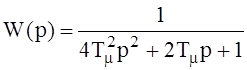
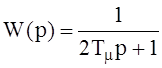
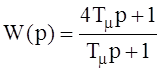
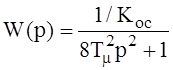
Передаточная функция контура, состоящего из двух инерционных звеньев и настроенного на «технический» оптимум, будет… |
1.
2.
3.
4.
5.
|
|
21 |
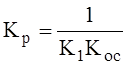
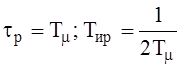
Условием настройки на «технический» оптимум контура из двух инерционных звеньев первого порядка является… |
1.
2.
3.
4.
5.
|
|
22 |
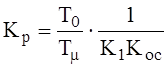
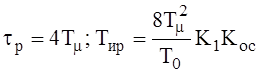
Условием настройки на «технический» оптимум контура из инерционного звена с малой постоянной времени Тμ и интегрирующего звена с большой постоянной времени Т0 является… |
1.
2.
3.
4.
5.
|
|
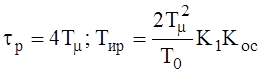
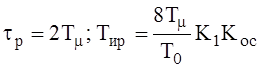
23 |
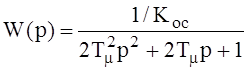
Передаточная функция контура с большой постоянной времени в интегрирующем звене, настроенного на симметричный оптимум, будет… |
1.
2.
3.
4.
5.
|
|
24 |
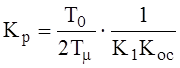
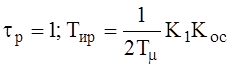
Условием настройки контура на симметричный оптимум является… |
1.
2.
3.
4.
5.
|
|
25 |
Экскаваторная характеристика в электроприводе по системе Г-Д формируется… |
1. за счет положительной обратной связи по напряжению 2. за счет отрицательной обратной связи по току 3. за счет задержанной обратной связи по току 4. за счет обратной связи по скорости 5. воздействием на ток возбуждения |
|
26 |
Экскаваторная характеристика в электроприводе по системе ТП-Д формируется… |
1. за счет отрицательной обратной связи по току 2. за счет нелинейной обратной связи в регуляторе скорости 3. за счет обратной связи по напряжению двигателя 4. воздействием на ток возбуждения 5. за счет обратной связи по скорости |
|
27 |
Однократно интегрирующая система электропривода ТП-Д содержит… |
1. ПИ-регулятор тока, П-регулятор скорости 2. П-регулятор тока, ПИ-регулятор скорости 3. П-регулятор тока, П-регулятор скорости 4. ПИД-регулятор тока, П-регулятор скорости 5. П-регулятор тока, ПИД-регулятор скорости |
|
28 |
Двукратно интегрирующая система электропривода ТП-Д содержит… |
1. П-регулятор тока, ПИ-регулятор скорости 2. ПИ-регулятор тока, П-регулятор скорости 3. ПИ-регулятор тока, ПИ-регулятор скорости 4. ПИД-регулятор тока, П-регулятор скорости 5. П-регулятор тока, ПИД-регулятор скорости |
|
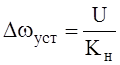
29 |
Статическая ошибка в однократно интегрирующей системе ТП-Д… |
1. равна нулю 2. определяется выражением
3. отрицательна 4. определяется выражением
5. определяется выражением
|
|
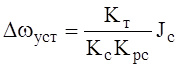
30 |
Статическая ошибка в двукратно интегрирующей системе ТП-Д… |
1. равна нулю 2. определяется выражением
3. отрицательна 4. определяется выражением
5. определяется выражением
|
|
31 |
Структура САУ электроприводом с последовательной коррекцией наиболее распространенная и предпочтительная благодаря… |
1. простоте 2. независимой настройке регуляторов внутренних и внешних контуров 3. уменьшению количества регуляторов 4. упрощению алгоритма САУ 5. снижению требований к динамическим характеристикам |
|
32 |
Закон частотного управления асинхронным электроприводом |
1. напряжения 2. скольжения 3. перегрузочной способности
4. магнитного потока 5. мощности двигателя |
|
33 |
Системы частотно-токового управления асинхронным приводом построены по принципу… |
1. поддержания магнитного потока 2. задания и поддержания тока регулятором тока в каждой фазе 3. поддержания мощности 4. поддержания скорости 5. изменения сопротивления ротора |
|
34 |
Системы векторного управления электроприводом переменного тока основаны на принципе… |
1. идентификации 2. преобразования координат из неподвижных осей во вращающиеся и наоборот 3. исключения промежуточных координат 4. импульсного регулирования потока двигателя 5. контроля скольжения двигателя |
|
35 |
В структуре векторного управления асинхронным электроприводом используется алгоритм… |
1. импульсно-фазового управления 2. двухзонного регулирования по структуре подчиненного управления 3. параллельной коррекции 4. экстремального управления 5. модального управления |
|
36 |
Электромагнитный момент машины переменного тока определяется выражением… |
1.
2.
3.
4.
5.
|
|
37 |
Алгоритм цифрового управления электроприводом представляется… |
1. дифференциальными уравнениями 2. разностными уравнениями 3. логическими уравнениями 4. граф-схемой 5. циклограммой |
|
38 |
Система прямого цифрового управления электроприводом постоянного тока реализует… |
1. аналоговое управление в контуре тока и цифровое - в контуре скорости 2. цифровой контур скорости и тока 3. аналоговый контур скорости и цифровой контур тока 4. стабилизацию напряжения 5. минимизацию потребляемой мощности |
|
39 |
Алгоритм регулятора тока в системе прямого цифрового управления формируется в предположении… |
1. постоянства напряжения 2. постоянства тока на интервале повторяемости вентилей (ИПВ) 3. линейного изменения тока на ИПВ 4. постоянства мощности 5. неизменности среднего тока |
|
40 |
Интервал повторяемости вентилей (ИПВ) в системах цифрового управления электроприводом постоянного тока при частоте питающей сети 50 Гц и мостовой схеме выпрямителей составляет… |
1. 10 мс 2. 0,02 с 3. 3,3 мс 4. 1,7 мс 5. 0,2 с |
|
41 |
Алгоритм системы прямого цифрового управления электроприводом постоянного тока формирует в контуре тока… |
1. сигнал обратной связи по скорости 2. сигнал задания темпа изменения скорости 3. сигналы управления ключевыми элементами полупроводникового преобразователя 4. сигналы управления предельной мощностью 5. сигналы взаимосвязи с верхним уровнем управления электроприводом |
|
42 |
Реализация алгоритма прямого цифрового управления электроприводом постоянного тока с мостовым тиристорным преобразователем при частоте 50 Гц требует быстродействия микропроцессорного управляющего устройства не менее… |
1.
200 000 2.
10 000 3.
106 4.
1 000 5.
107 |
|
43 |
Статическая ошибка в двукратно интегрирующей системе подчиненного регулирования электроприводом постоянного тока по сравнению с однократно интегрирующей… |
1. больше 2. равна нулю 3. отрицательная 4. зависит от нагрузки 5. зависит от задающего сигнала |
|
44 |
Алгоритм управления с настройкой на «технический» оптимум в контуре тока реализуется… |
1. П-регулятором 2. ПИД-регулятором 3. ПИ-регулятором 4. И-регулятором 5. релейным регулятором |
|
45 |
Алгоритм управления с настройкой на симметричный оптимум реализуется… |
1. П-регулятором 2. ПИД-регулятором 3. ПИ-регулятором 4. И-регулятором 5. релейным регулятором |
|
46 |
В системе двухзонного управления электроприводом постоянного тока регулирование частоты вращения двигателя в диапазоне от ωн до 2ωн осуществляется… |
1. регулированием напряжения якоря 2. ослаблением магнитного потока 3. изменением уставки по току якоря 4. изменением настройки регулятора скорости 5. изменением темпа задания скорости |
|
47 |
Задание на ослабление магнитного потока в системе двухзонного регулирования формируется регулятором… |
1. тока 2. скорости 3. ЭДС 4. напряжения 5. темпа задания скорости |
|
48 |
Для перевода тиристорного электропривода в режим рекуперативного торможения с отдачей энергии в сеть необходимо… |
1. подключить тормозные сопротивления 2. перевести тиристорный преобразователь в инверторный режим 3. изменить настройку регулятора тока возбуждения 4. изменить настройку регулятора тока якоря 5. отключить тиристорный преобразователь от сети |
|
49 |
Синтез алгоритма цифрового регулятора скорости в системах управления электроприводом постоянного тока по структуре подчиненного регулирования осуществляется… |
1. без использования параметров аналоговых регуляторов при такой же структуре 2. с использованием параметров аналоговых регуляторов для расчета коэффициентов разностных уравнений 3. с использованием метода конечных элементов 4. с использованием методов динамического программирования 5. с использованием методов припасовывания |
|
50 |
Управление моментом двигателя постоянного тока в режиме динамического торможения осуществляется воздействием на… |
1. систему управления вентилями силового преобразователя 2. регулятор тока возбуждения двигателя и контактор торможения 3. автоматический выключатель в цепи питания силового преобразователя 4. автоматический выключатель питания возбудителя 5. амплитуду импульсов управления тиристорами силового преобразователя |
|
51 |
Адаптивные системы управления обеспечивают оптимальное протекание процессов… |
1. при отключении системы управления 2. в условиях неопределенности или неполноты информации об условиях работы объекта 3. при исчезновении напряжения питания 4. в условиях переключения алгоритмов управления 5. при снижении надежности привода |
|
52 |
Алгоритм прямого управления моментом (DTC) асинхронного электропривода реализует в контуре тока… |
1. аналоговое управление током двигателя 2. импульсное управление током намагничивания 3. аналоговое управление током намагничивания 4. разрывное управление «в скользящем режиме» 5. инверторное управление |
|
53 |
Точность остановки электропривода в наибольшей степени повышается за счет… |
1. увеличения момента 2. уменьшения момента инерции J 3. снижения начальной скорости и увеличения жесткости механической характеристики 4. увеличения напряжения 5. снижения тока намагничивания |
|
54 |
Вентильный двигатель представляет собой электромашиннополупроводниковый комплекс, содержащий… |
1. машину постоянного тока и управляемый выпрямитель 2. асинхронный двигатель с преобразователем частоты 3. широтно-импульсный модулятор и двигатель постоянного тока 4. синхронную машину, полупроводниковый коммутатор и датчик положения ротора 5. синхронную машину с преобразователем частоты |
|
55 |
Наиболее надежная по условиям опрокидывания инвертора работа электропривода с вентильным двигателем обеспечивается при законе управления… |
1. β0 = const 2. β = const 3. δ = const 4. γ = const 5. γ = 0 |
|
56 |
Оптимальный закон векторного управления электроприводом с использованием вентильного двигателя с возбуждением от постоянных магнитов обеспечивается при угле сдвига между вектором тока и вектором потокосцепления… |
1.
2.
3.
4.
5.
|
|
57 |
Регулирование частоты вращения синхронного двигателя обеспечивается… |
1. регулированием тока возбуждения 2. изменением частоты питающего двигатель напряжения 3. изменением амплитуды питающего двигатель напряжения 4. одновременным изменением частоты и амплитуды по определенному закону 5. регулированием коэффициента мощности питающей сети |
|
58 |
При использовании структуры подчиненного регулирования в системах векторного управления с синхронным двигателем все контуры управления настраиваются по условиям, близким к условиям… |
1. «симметричного оптимума» 2. «технического оптимума» 3. минимизации статической ошибки 4. обеспечения максимального коэффициента мощности 5. минимизации потерь |
|
59 |
Наилучшими динамическими характеристиками обладает частотно-регулируемый электропривод с асинхронным двигателем, система управления которого реализует алгоритм… |
1. подчиненного регулирования 2. скалярного управления 3. разомкнутого управления с поддержанием заданного закона U/f 4. поддержания потока 5. прямого управления моментом (DTC) |
|
60 |
Эксплуатационные характеристики электропривода с вентильным двигателем ближе всего к характеристикам электропривода… |
1. с асинхронным двигателем 2. с синхронным двигателем 3. с двигателем постоянного тока 4. с вентильно-реактивным двигателем 5. с шаговым двигателем |
|
61 |
В электроприводах с упругими связями для демпфирования механических колебаний требуется… |
1. изменить настройку регулятора скорости 2. ввести дополнительную обратную связь по упругому моменту в трансмиссии 3. ввести дополнительное воздействие на регулятор ЭДС 4. увеличить коэффициент усиления по току 5. ввести зону нечувствительности в контур скорости |
|
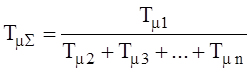
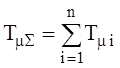
62 |
При использовании САУ по структуре подчиненного регулирования в контуре остается нескомпенсированная постоянная времени. Для системы из n контуров при наличии Тμ общая постоянная времени определяется выражением… |
1.
2.
3.
4.
5.
|
|
63 |
Зона прерывистых токов в электроприводах постоянного тока по схеме ТП-ДПТ образуется… |
1. при использовании систем раздельного управления преобразователем и больших углах управления α 2. при снижении тока возбуждения 3. при использовании системы согласованного управления 4. при отключении полупроводникового преобразователя 5. при частоте вращения близкой к номинальной |
|
64 |
Наилучшим решением исключения неустойчивости в контуре тока электропривода постоянного тока в режиме прерывистых токов является… |
1. использование методов адаптации регулятора контура 2. изменение настройки ПИ-регулятора 3. переход на П-регулятор при малых токах 4. введение зоны нечувствительности 5. снижение коэффициента усиления системы |
|
65 |
Тиристорные электроприводы с регулятором положения предназначены для… |
1. отработки заданного положения рабочего органа механизма 2. ускорения рабочего органа 3. изменения значения частоты вращения рабочего органа 4. ограничения предельной скорости двигателя 5. изменения направления вращения двигателя |
|
66 |
Основным требованием к системе регулирования положения является… |
1. высокая точность поддержания скорости 2. ограничение максимального значения тока 3. высокая точность установки в заданное положение и ограничение темпа ускорения и замедления 4. отсутствие перерегулирования в контуре скорости 5. отсутствие перерегулирования в контуре тока |
|
67 |
Добротность позиционной системы электропривода при скорости ведущего механизма ωмех и погрешности по положению ΔSi - это… |
1.
2.
3.
4.
5.
|
|
68 |
Система регулирования позиционного электропривода по структуре подчиненного регулирования, как правило, содержит… |
1. два контура регулирования (тока и скорости) 2. три контура регулирования (тока, скорости и положения) 3. два контура регулирования (тока и скорости) с дополнительной коррекцией 4. один контур регулирования (положения) 5. два контура регулирования (тока и положения) |
|
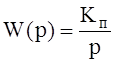
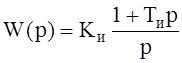
69 |
В следящих системах второго порядка астатизма используется регулятор положения с передаточной функцией… |
1. W(p) = Kп 2. W(p) = Kпp 3.
4.
5.
|
|
70 |
Задатчик интенсивности в структуре подчиненного регулирования реализуется на основе… |
1. пропорционального звена 2. интегрирующего звена 3. пропорционально-интегрирующего звена 4. пропорционально-дифференцирующего звена 5. апериодического звена |
|
71 |
Идентификация объекта управления (регулируемого электропривода) - это… |
1. расчет параметров регуляторов 2. анализ переходных процессов 3. оценка точности системы регулирования 4. определение систематической модели при известных входных воздействиях и выходных сигналах 5. поиск алгоритма оптимального управления |
|
72 |
Логарифмическая амплитудная характеристика электропривода постоянного тока с достаточной точностью может быть аппроксимирована тремя отрезками прямых с наклоном: в низкочастотной области а) … дБ/дек; в среднечастотной области б) … дБ/дек; в высокочастотной области в) … дБ/дек. |
1. а) 0; б) 40; в) 60 2. а) 20; б) 40; в) 60 3. а) 0; б) 20; в) 40 4. а) 40; б) 20; в) 0 5. а) 20; б) 20; в) 20 |
|
73 |
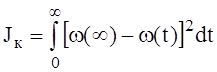
Интегральная оценка качества процесса управления по скорости |
1. линейной 2. оценкой по модулю 3. квадратичной 4. улучшенной квадратичной 5. периодической |
|
|
Приведенная логарифмическая характеристика соответствует… |
1. интегральному звену 2. дифференцирующему звену 3. инерционному (апериодическому) звену 4. безынерционному звену 5. пропорционально-интегрирующему звену |
|
75 |
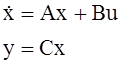
В приведенных матричных уравнениях в переменных состояния для стационарной линейной системы…
|
1. А - матрица системы, В - матрица управления, С - матрица измерения 2. А - матрица системы, В - матрица измерения, С - матрица управления 3. А - матрица управления, В - матрица системы, С - матрица измерения 4. А - матрица управления, В - матрица измерения, С - матрица системы 5. А - матрица измерения, В - матрица управления, С - матрица системы |
|
76 |
Адаптивный регулятор с настраиваемой моделью имеет преимущества по сравнению с адаптивным регулятором с эталонной моделью благодаря… |
1. «грубости» адаптивных алгоритмов к неучтенным малым параметрам и простоте реализации 2. увеличению перерегулирования по основной координате 3. уменьшению коэффициента усиления 4. увеличению коэффициента неравномерности вращения при низких скоростях 5. упрощению алгоритма управления |
|
77 |
Для «моментного» электропривода электродвигатели проектируются из расчета… |
1. обеспечения максимальной мощности 2. получения максимального вращающегося момента в данном габарите при работе на низких скоростях вращения 3. постоянства момента при изменении скорости вращения 4. регулирования момента пропорционально скорости 5. постоянства мощности во всех режимах |
|
78 |
Управление пуском электропривода с реостатным регулированием скорости в функции времени осуществляется… |
1. за счет включения аппаратов, контролирующих время, настроенных на отсчет определенных, заранее заданных выдержек времени 2. путем прямого включения двигателя 3. ограничением скорости двигателя в период пуска 4. ограничением тока двигателя 5. при постоянстве пускового сопротивления |
|
79 |
Реверс асинхронного двигателя в электроприводе по схеме ПЧ-АД осуществляется… |
1. переключением фаз питающего ПЧ напряжения реверсором 2. изменением амплитуды питающего ПЧ напряжения 3. изменением напряжения АД 4. переключением фаз напряжения, питающего АД, воздействием на систему управления ПЧ 5. переводом ПЧ в режим инвертирования |
|
80 |
Пуск синхронного двигателя осуществляется… |
1. в режиме асинхронного пуска при отключенном возбуждении 2. в режиме асинхронного пуска с обмоткой возбуждения, замкнутой накоротко 3. в режиме асинхронного пуска с обмоткой возбуждения, замкнутой на гасящее сопротивление и подачей на нее напряжения в функции времени 4. в режиме асинхронного пуска с постоянным током возбуждения 5. подачей напряжения на обмотку возбуждения |
|
81 |
Для защиты асинхронных короткозамкнутых двигателей с начальным пусковым током Iп ток уставки автоматического выключения двигателя Iуст выбирается из условия… |
1. Iуст = Iп 2. Iуст = Iн 3. Iуст = (1,3÷1,5)Iп 4. Iуст = 3Iп 5. Iуст = 0,5Iн |
|
82 |
Защита электропривода от самозапуска («нулевая защита») обеспечивает… |
1. отключение двигателя при чрезмерном снижении напряжения и невозможность запуска при ненулевом положении контроллера 2. отключение двигателя и повторный запуск при любом положении контроллера 3. отключение двигателя при сдвиге контроллера из нулевого положения 4. защиту при исчезновении тока возбуждения 5. защиту от перенапряжения |
|
83 |
Мехатронный модуль движения представляет собой… |
1. исполнительный двигатель и сетевой преобразователь 2. исполнительный двигатель и рабочий механизм 3. исполнительный двигатель, силовой преобразователь и встроенную электронную систему управления 4. силовой полупроводниковый преобразователь с пультом управления 5. рабочий механизм |
|
84 |
Электроприводы с вентильно-индукторными двигателями (ВИД) имеют хорошие перспективы использования, обусловленные тем, что… |
1. индукторный двигатель возбуждается от постоянных магнитов 2. система управления электроприводом обеспечивает синусоидальную форму тока в фазах двигателя 3. ВИД имеет гладкий ротор 4. ВИД имеет пассивный зубчатый ротор и электронную систему управления, снижающую шумы и вибрации 5. электронный коммутатор управляется независимо от положения ротора |
|
85 |
Скалярное управление электроприводом переменного тока используется… |
1. при небольшом диапазоне регулирования скорости и относительно низком быстродействии 2. в широкодиапазонном электроприводе 3. при очень жестких требованиях по быстродействию 4. в перегруженном электроприводе 5. при реостатном управлении |
|
86 |
Микроконтроллеры для управления двигателями на базе сигнальных (DSP) контроллеров содержат… |
1. встроенные периферийные устройства, предназначенные для оптимального сопряжения контроллера с инверторами и датчиками обратных связей 2. стандартные периферийные устройства 3. устройства преобразования видеосигналов 4. усилители мощности выходных сигналов контроллера 5. датчики обратных связей системы электропривода |
|
87 |
В системах бездатчикового управления электроприводом для оценки механических координат привода (положения, скорости, ускорения) используются… |
1. импульсные датчики скорости 2. специальные цифровые наблюдатели, вычисляющие координаты по математической модели 3. заранее рассчитанные значения сигналов обратных связей 4. индукционные датчики скорости и положения 5. датчики нуля тока двигателя |
|
88 |
Для измерения электрических переменных микроконтроллер должен иметь встроенный АЦП с разрешением не ниже 10÷12 двоичных разрядов и временем преобразования не хуже… |
1. 1 мин 2. 10 с 3. (5÷10) мкс 4. 0,01 мкс 5. 0,02 с |
|
89 |
В современных системах электропривода переменного тока с широтно-импульсной модуляцией (ШИМ) наиболее применяемыми полупроводниковыми элементами силовых преобразователей частоты являются… |
1. диоды 2. тиристоры 3. динисторы 4. семисторы 5. IGBT |
|
90 |
Гальваническая развязка между силовой и управляющей частями системы управления современного цифрового электропривода обеспечивается… |
1. трансформаторами 2. оптопарами или оптоусилителями 3. резисторами 4. реле 5. автоматическими выключателями |
|
91 |
Применение нечеткого регулятора (FAZZY-регулятора) обеспечивает в системе электропривода… |
1. расширение диапазона регулирования скорости 2. максимальное быстродействие 3. свойство «грубости» к ограниченным изменениям параметров системы и внешним возмущениям 4. режимы стоянки электродвигателя под током 5. защиту от коротких замыканий |
|
92 |
В следящих системах электропривода величина статического угла рассогласования δс… |
1. не зависит от момента сил сопротивления 2. прямо пропорциональна моменту сил сопротивления и обратно пропорциональна коэффициенту усиления системы К 3. не зависит от коэффициента усиления системы К 4. постоянна 5. определяется типом электропривода |
|
93 |
В следящих системах электропривода динамическая ошибка угла рассогласования δд… |
1. не зависит от скорости синхронного вращения 2. не зависит от коэффициента усиления К 3. постоянна во всех режимах 4. пропорциональна скорости синхронного вращения и обратно пропорциональна коэффициенту К 5. пропорциональна коэффициенту усиления системы и обратно пропорциональна скорости синхронного вращения |
|
94 |
Зона нечувствительности в системе управления следящим электроприводом способствует… |
1. увеличению запаса устойчивости привода и снижению точности 2. увеличению быстродействия 3. снижению запаса устойчивости и точности 4. снижению запаса устойчивости и повышению точности 5. повышению КПД электропривода |
|
95 |
В следящих электроприводах критическая величина зазора в механической передаче, при которой возникают автоколебания,… |
1. не зависит от суммарного момента сухого трения и коэффициента усиления системы 2. возрастает с ростом суммарного момента сухого трения и уменьшается с ростом коэффициента усиления К 3. уменьшается с ростом суммарного момента сухого трения и ростом коэффициента усиления К 4. уменьшается с ростом суммарного момента сухого трения и уменьшением коэффициента усиления К 5. остается постоянной во всех режимах |
|
96 |
Схема управления шаговым электроприводом представляет собой… |
1. управляемый выпрямитель 2. ШИМ-преобразователь с синусоидальной модуляцией 3. полупроводниковый преобразователь, вырабатывающий m-фазную систему импульсов напряжения несинусоидальной формы 4. источник постоянного тока 5. генератор пилообразного напряжения |
|
97 |
Цифровая система управления электроприводом в сравнении с аналоговой обеспечивает… |
1. более высокое быстродействие 2. более высокую точность при быстродействии, обусловленном дискретностью 3. те же статические и динамические характеристики привода 4. исключение настройки регуляторов 5. снижение помехоустойчивости |
|
98 |
В системе электропривода переменного тока выпрямитель - ШИМ-инвертор - асинхронный двигатель тормозные режимы обеспечиваются… |
1. рекуперацией энергии в питающую сеть 2. рекуперацией энергии в тормозных сопротивлениях, подключаемых в режимах торможения 3. в режиме свободного выбега 4. не могут быть обеспечены 5. подключением источника постоянного тока к двигателю |
|
99 |
В системах электропривода переменного тока по схеме НПЧ-АД режимы торможения обеспечиваются… |
1. рекуперацией энергии в сеть 2. подключением специальных тормозных сопротивлений 3. подачей в двигатель постоянного тока 4. не могут быть обеспечены 5. в режиме свободного выбега |
|
100 |
Системы электропривода переменного тока по схеме асинхронно-вентильного каскада с использованием асинхронного двигателя с фазным ротором наиболее приемлемы для механизмов… |
1. с тяговой характеристикой 2. с вентиляторной характеристикой и малым диапазоном регулирования скорости 3. подъемных 4. экскаваторных 5. буровых |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
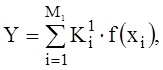 где
где 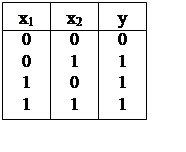 6
6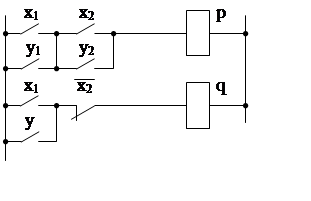 8
8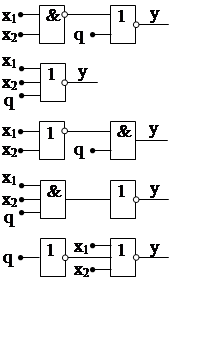
 10
10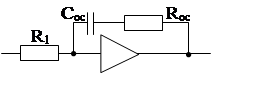 17
17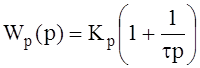 является функцией…
является функцией…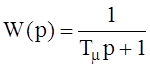










 является…
является…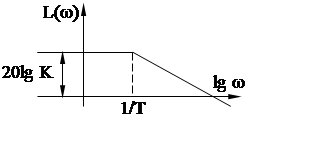 74
74