9 Механизация производственных процессов
9.1 Автоматизация процесса обмывки тележек
Этап 1
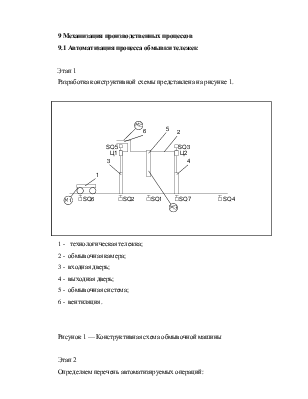
Разработка конструктивной схемы представлена на рисунке 1.
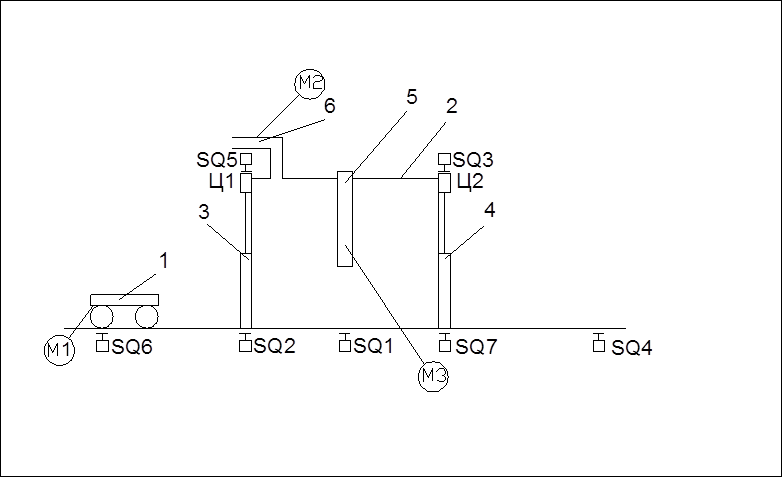
1 - технологическая тележка;
2 - обмывочная камера;
3 - входная дверь;
4 - выходная дверь;
5 - обмывочная система;
6 - вентиляция.
Рисунок 1 — Конструктивная схема обмывочной машины
Этап 2
Определяем перечень автоматизируемых операций:
— ожидание;
— подача тележки в мойку;
— закрывание входной двери;
— обмывка;
— обдувка;
— открытие выходной двери;
— выкатка тележки;
— открытие входной двери;
— возврат технологической тележки;
— закрывание выходной двери.
Этап3
Размещение силовых приводов
Для перемещения технологической тележки используем реверсивный двигатель М1.
Открывание и закрывание дверей выполняется с помощью пневмоцилиндров Ц1 и Ц2.
Насос моечной машины приводится в движение электродвигателями М2.
Вентилятор приводится во вращение с помощью электродвигателями М3.
Этап 4
Концевые выключатели SQ1-SQ7 устанавливаются в крайних точках перемещение устройств обмывочной машины и внутри обмывочной камеры.
Этап 5
Определение перечня устройств управляющих силовыми приводами.
— электродвигатель М1 (реверсивный) управляется электромагнитным контактором КМ1 при прямом и КМ2 при обратном;
— электродвигатель М2 (реверсивный) управляется электромагнитным контактором КМ3;
— электродвигатель М3 (реверсивный) управляется электромагнитным контактором — КМ4;
Пневмоцилиндр Ц1 управляется электромагнитным золотником распылителем УА1: катушка УА1.1 обеспечивает открывание дверей , а УА1.2 ее закрывание.
Пневмоцилиндр Ц2 управляется электромагнитным золотником распылителем УА2: катушка УА2.1 обеспечивает открывание дверей , а УА2.2 ее закрывание.
— УА3 управляется подачей сжатого воздуха при обдувке тележки.
Этап 6
Построение циклограммы
Построенная циклограмма представлена в графической части дипломного проекта, лист 5
Этап 7
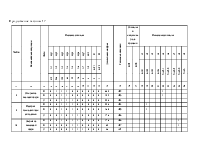
Составляем таблицу соответствия автоматизируемых устройств.
Каждая производственная операция характеризуется порядковым номером, наименованием, фазой — Н - начало, П - продолжение, З - завершение. Эта информация указывается в графах 1-3 таблицы 17.
Входные переменные обозначаются Х:
— Х1=1 при замыкании SQ1;
— Х2=1 при замыкании SQ2;
— Х3=1 при замыкании SQ3;
— Х4=1 при замыкании SQ4;
— Х5=1 при замыкании SQ5;
— Х6=1 при замыкании SQ6;
— Х7=1 при замыкании SQ7;
— Х8=1 при замыкании SB3.
Если концевой выключатель не замкнут, то Х=0. Эта информация указывается в графах 4-11.
Входные сигналы вырабатываемые устройствами выдержки времени обозначим Т1 и Т2. Т1=0 и Т2=0 до срабатывания устройства обеспечивающего выдержку времени. Т1=1 и Т2=1 после срабатывания этого устройства. Эта информация указывается в графах 12-13.
Составляем десятичные шифры входных сигналов автомата. Десятичные шифры получаются путем перевода в десятичную форму двоичного числа, характеризующих совокупность входных сигналов автомата. Эта информация указывается в графе 14.
Определяем состояния автомата. Состояния автомата это часть рабочего цикла, характеризующаяся неизменными входными, выходными и промежуточными (если они есть) сигналами автомата, обозначается — А. Эта информация указывается в графе 15.
Различное состояния автомата с одинаковыми сочетаниями входных сигналов отсутствуют, поэтому промежуточную переменную вводить не требуется.
Для того чтобы устройство обеспечивающее выдержку времени сработало, после окончания заданного интервала времени, необходимо чтобы в течении всего этого интервала и некоторого времени после него на вход устройства поступал сигнал равный единице. Эта информация указывается в графах 16-17.
Выходные сигналы автомата обозначаются Z. Они соответствуют устройствам автоматики, непосредственно управляющим силовыми приводами. Эта информация указывается в графах 18-26.
Таблица 17- Таблица соответствия
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.