ЛЕКЦИЯ 16
7.4. Устройства формирования и обработки сложных сигналов
В
современных радиолокационных станциях в качестве импульсных зондирующих
сигналов очень широко используются сигналы с произведением длительности Т
на полосу ![]() f : T
f : T![]() f >>1, известные под
названием сложных сигналов. Они обеспечивают высокую разрешающую способность и
дальность действия при ограниченной мощности передатчика. Среди этой группы
сигналов наибольшее распространение получили фазомодулированные и
частотно-модулированные сигналы. С помощью АРК можно формировать и обрабатывать
(согласованная фильтрация) эти сигналы.
f >>1, известные под
названием сложных сигналов. Они обеспечивают высокую разрешающую способность и
дальность действия при ограниченной мощности передатчика. Среди этой группы
сигналов наибольшее распространение получили фазомодулированные и
частотно-модулированные сигналы. С помощью АРК можно формировать и обрабатывать
(согласованная фильтрация) эти сигналы.
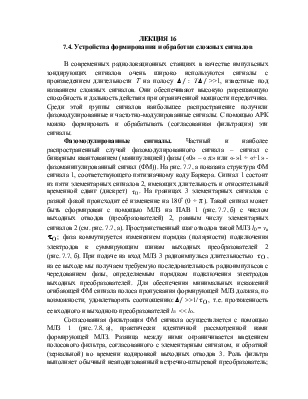
Фазомодулированные
сигналы. Частный и наиболее распространенный случай фазомодулированного
сигнала – сигнал с бинарным квантованием (манипуляцией) фазы («0» – «![]() » или «-»1 ÷ «+1» - фазоманипулированный
сигнал (ФМ)). На рис. 7.7, а показана структура ФМ сигнала 1, соответствующего
пятизначному коду Баркера. Сигнал 1 состоит из пяти элементарных сигналов 2,
имеющих длительность и относительный временной сдвиг (дискрет)
» или «-»1 ÷ «+1» - фазоманипулированный
сигнал (ФМ)). На рис. 7.7, а показана структура ФМ сигнала 1, соответствующего
пятизначному коду Баркера. Сигнал 1 состоит из пяти элементарных сигналов 2,
имеющих длительность и относительный временной сдвиг (дискрет) ![]() . На границах 3 элементарных сигналов
с разной фазой происходит её изменение на 180º
(0 ÷
. На границах 3 элементарных сигналов
с разной фазой происходит её изменение на 180º
(0 ÷ ![]() ). Такой сигнал может быть
сформирован с помощью МЛЗ на ПАВ 1 (рис. 7.7, б) с числом выходных
отводов (преобразователей) 2, равным числу элементарных сигналов 2 (см.
рис. 7.7, а). Пространственный шаг отводов такой МЛЗ l0= vа
). Такой сигнал может быть
сформирован с помощью МЛЗ на ПАВ 1 (рис. 7.7, б) с числом выходных
отводов (преобразователей) 2, равным числу элементарных сигналов 2 (см.
рис. 7.7, а). Пространственный шаг отводов такой МЛЗ l0= vа ![]() ; фаза
коммутируется изменением порядка (полярности) подключения электродов к
суммирующим шинам выходных преобразователей 2 (рис. 7.7, б). При
подаче на вход МЛЗ 3 радиоимпульса длительностью
; фаза
коммутируется изменением порядка (полярности) подключения электродов к
суммирующим шинам выходных преобразователей 2 (рис. 7.7, б). При
подаче на вход МЛЗ 3 радиоимпульса длительностью ![]() ,
на ее выходе мы получаем требуемую последовательность радиоимпульсов с
чередованием фазы, определяемым порядком подключения электродов выходных
преобразователей. Для обеспечения минимальных искажений огибающей ФМ сигнала
полоса пропускания формирующей МЛЗ должна, по возможности, удовлетворять
соотношению:
,
на ее выходе мы получаем требуемую последовательность радиоимпульсов с
чередованием фазы, определяемым порядком подключения электродов выходных
преобразователей. Для обеспечения минимальных искажений огибающей ФМ сигнала
полоса пропускания формирующей МЛЗ должна, по возможности, удовлетворять
соотношению:![]() f >>1/
f >>1/![]() , т.е. протяженность ее входного и
выходного преобразователей lп
<< lo.
, т.е. протяженность ее входного и
выходного преобразователей lп
<< lo.
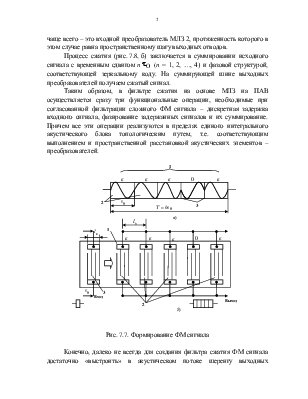
Согласованная фильтрация ФМ сигнала осуществляется с помощью МЛЗ 1 (рис. 7.8, а), практически идентичной рассмотренной нами формирующей МЛЗ. Разница между ними ограничивается введением полосового фильтра, согласованного с элементарным сигналом, и обратной (зеркальной) во времени кодировкой выходных отводов 3. Роль фильтра выполняет обычный неаподизованный встречно-штыревой преобразователь; чаще всего – это входной преобразователь МЛЗ 2, протяженность которого в этом случае равна пространственному шагу выходных отводов.
Процесс
сжатия (рис. 7.8, б) заключается в суммировании исходного сигнала с
временным сдвигом n![]() (n = 1, 2,
…, 4) и фазовой структурой, соответствующей зеркальному коду. На суммирующей
шине выходных преобразователей получаем сжатый сигнал.
(n = 1, 2,
…, 4) и фазовой структурой, соответствующей зеркальному коду. На суммирующей
шине выходных преобразователей получаем сжатый сигнал.
Таким образом, в фильтре сжатия на основе МЛЗ на ПАВ осуществляется сразу три функциональные операции, необходимые при согласованной фильтрации сложного ФМ сигнала – дискретная задержка входного сигнала, фазирование задержанных сигналов и их суммирование. Причем все эти операции реализуются в пределах единого интегрального акустического блока топологическим путем, т.е. соответствующим выполнением и пространственной расстановкой акустических элементов – преобразователей.
Рис. 7.7. Формирование ФМ сигнала
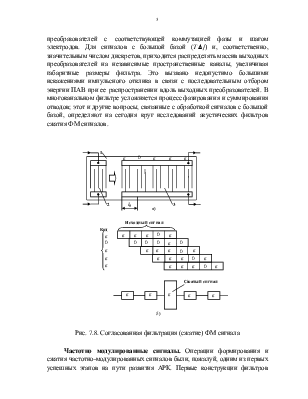
Конечно,
далеко не всегда для создания фильтра сжатия ФМ сигнала достаточно «выстроить»
в акустическом потоке шеренгу выходных преобразователей с соответствующей коммутацией
фазы и шагом электродов. Для сигналов с большой базой (T![]() f) и, соответственно,
значительным числом дискретов, приходится распределять массив выходных
преобразователей на независимые пространственные каналы, увеличивая габаритные
размеры фильтра. Это вызвано недопустимо большими искажениями импульсного отклика
в связи с последовательным отбором энергии ПАВ при ее распространении вдоль
выходных преобразователей. В многоканальном фильтре усложняется процесс
фазирования и суммирования отводов; этот и другие вопросы, связанные с
обработкой сигналов с большой базой, определяют на сегодня круг исследований
акустических фильтров сжатия ФМ сигналов.
f) и, соответственно,
значительным числом дискретов, приходится распределять массив выходных
преобразователей на независимые пространственные каналы, увеличивая габаритные
размеры фильтра. Это вызвано недопустимо большими искажениями импульсного отклика
в связи с последовательным отбором энергии ПАВ при ее распространении вдоль
выходных преобразователей. В многоканальном фильтре усложняется процесс
фазирования и суммирования отводов; этот и другие вопросы, связанные с
обработкой сигналов с большой базой, определяют на сегодня круг исследований
акустических фильтров сжатия ФМ сигналов.
Рис. 7.8. Согласованная фильтрация (сжатие) ФМ сигнала
Частотно
модулированные сигналы. Операции формирования и сжатия
частотно-модулированных сигналов были, пожалуй, одним из первых успешных этапов
на пути развития АРК. Первые конструкции фильтров сжатия
линейно-частотно-модулированных (ЛЧМ) сигналов на ПАВ появились в семидесятых
годах прошлого столетия. Сегодня ЛЧМ фильтры на ПАВ способны вести обработку
сигналов с максимальной длительностью T до 100 –
150 мкс и максимальной девиацией ![]() f
до 300 – 500 МГц. Естественно, что предельные значения этих параметров
не реализуются одновременно в одной конструкции; однако максимальная база
обрабатывающих сигналов Т
f
до 300 – 500 МГц. Естественно, что предельные значения этих параметров
не реализуются одновременно в одной конструкции; однако максимальная база
обрабатывающих сигналов Т![]() f достигает
значений 2÷5·103.
f достигает
значений 2÷5·103.
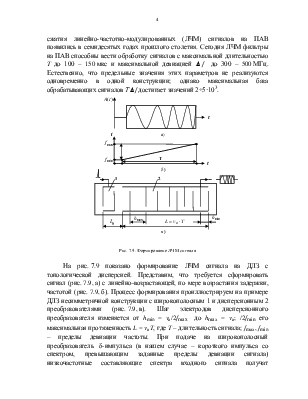
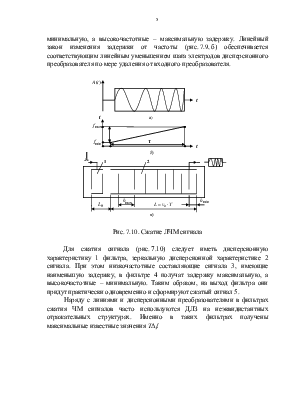
Рис. 7.9. Формирование ЛЧМ сигнала
На рис. 7.9 показано формирование ЛЧМ сигнала на ДЛЗ с
топологической дисперсией. Представим, что требуется сформировать сигнал
(рис. 7.9, а) с линейно-возрастающей, по мере возрастания задержки,
частотой (рис. 7.9, б). Процесс формирования проиллюстрируем на
примере ДЛЗ несимметричной конструкции с широкополосным 1 и дисперсионным 2 преобразователями
(рис. 7.9, в). Шаг электродов дисперсионного преобразователя
изменяется от hmin = vа/2fmax до hmax = vа; /2fmin
его максимальная протяженность L = vаT, где T – длительность сигнала; fmax, fmin – пределы девиации частоты. При подаче на
широкополосный преобразователь ![]() -импульса (в нашем
случае – короткого импульса со спектром, превышающим заданные пределы девиации
сигнала) низкочастотные составляющие спектра входного сигнала получат
минимальную, а высокочастотные – максимальную задержку. Линейный закон
изменения задержки от частоты (рис. 7.9, б) обеспечивается
соответствующим линейным уменьшением шага электродов дисперсионного преобразователя
по мере удаления от входного преобразователя.
-импульса (в нашем
случае – короткого импульса со спектром, превышающим заданные пределы девиации
сигнала) низкочастотные составляющие спектра входного сигнала получат
минимальную, а высокочастотные – максимальную задержку. Линейный закон
изменения задержки от частоты (рис. 7.9, б) обеспечивается
соответствующим линейным уменьшением шага электродов дисперсионного преобразователя
по мере удаления от входного преобразователя.
Рис. 7.10. Сжатие ЛЧМ сигнала
Для сжатия сигнала (рис. 7.10) следует иметь дисперсионную характеристику 1 фильтра, зеркальную дисперсионной характеристике 2 сигнала. При этом низкочастотные составляющие сигнала 3, имеющие наименьшую задержку, в фильтре 4 получат задержку максимальную, а высокочастотные – минимальную. Таким образом, на выход фильтра они придут практически одновременно и сформируют сжатый сигнал 5.
Наряду с линиями и дисперсионными преобразователями в фильтрах сжатия ЧМ сигналов часто используются ДЛЗ на неэквидистантных отражательных структурах. Именно в таких фильтрах получены максимальные известные значения TΔf.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.