ЛЕКЦИЯ 14
7. ПРИМЕРЫ ИСПОЛЬЗОВАНИЯ АРК
В СОВРЕМЕННОЙ РАДИОЭЛЕКТРОННОЙ
АППАРАТУРЕ
Среди многочисленных функциональных операций, успешно решаемых с помощью АРК, рассмотрим лишь наиболее характерные, отражающие основные преимущества данной элементной базы. В конкретных устройствах уже рассмотренные нами линии задержки, фильтры и резонаторы используются либо непосредственно, либо в совокупности с другими элементами или устройствами. Параметры устройства в целом практически определяются параметрами используемого АРК, т. е. роль внешних элементов сводится к согласованию, компенсации вносимых потерь или к коммутации отдельных элементов АРК.
Во всех случаях речь идет об устройствах, осуществляющих сугубо определенную функциональную операцию обработки сигнала, хорошо знакомую читателям по другим ее физическим реализациям. Таким образом, дополнительно подчеркивается специфика и преимущества акустической реализации этих операций.
7.1. Устройства с регулируемой задержкой сигнала
Принципы реализации фиксированной задержки
электрических сигналов с помощью ПАВ устройств были подробно рассмотрены в гл.
5. В целом ряде современных радиоэлектронных устройств требуется регулировать задержку
сигнала. Например, в радиодальномерах прецизионная регулируемая линия задержки
(РЛЗ) выполняет роль калибратора; в ряде конструкций фазометров ![]() РЛЗ используется для компенсации
фиксированной задержки измеряемой цепи и т. д.
РЛЗ используется для компенсации
фиксированной задержки измеряемой цепи и т. д.
Изменение задержки сигнала в заданных
пределах должно осуществляться дискретно или плавно. Дискретно изменять
(регулировать) задержку можно с помощью многоотводной ЛЗ
(рис. 7.1, а). Шаг ![]() выходных отводов
1-n выбирается с учетом минимального дискрета регулировки задержки
выходных отводов
1-n выбирается с учетом минимального дискрета регулировки задержки ![]() . Переключателем выбирается соответствующий
отвод, задержка сигнала на котором
. Переключателем выбирается соответствующий
отвод, задержка сигнала на котором ![]() определяется
начальной задержкой
определяется
начальной задержкой ![]() номером отвода
номером отвода ![]() и дискретом регулировки
и дискретом регулировки ![]() .
.
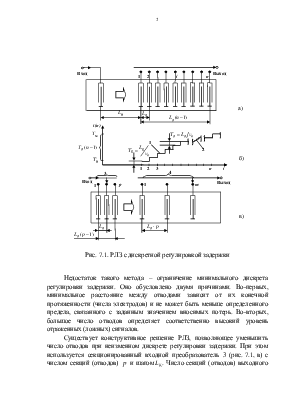
Регулировочная характеристика РЛЗ (1) (рис. 7.1, б) имеет ступенчатый (дискретный) характер.
Рис. 7.1. РЛЗ с дискретной регулировкой задержки
Недостаток такого метода – ограничение минимального дискрета регулировки задержки. Оно обусловлено двумя причинами. Во-первых, минимальное расстояние между отводами зависит от их конечной протяженности (числа электродов) и не может быть меньше определенного предела, связанного с заданным значением вносимых потерь. Во-вторых, большое число отводов определяет соответственно высокий уровень отраженных (ложных) сигналов.
Существует конструктивное решение РЛЗ,
позволяющее уменьшить число отводов при неизменном дискрете регулировки
задержки. При этом используется секционированный входной преобразователь 3
(рис. 7.1, в) с числом секций (отводов) ![]() и
шагом
и
шагом![]() . Число секций (отводов) выходного
преобразователя 4 – m, их шаг
. Число секций (отводов) выходного
преобразователя 4 – m, их шаг ![]() где
где
![]() . По существу, задержка регулируется
в два этапа: грубо – в выходном преобразователе 4 с дискретом
. По существу, задержка регулируется
в два этапа: грубо – в выходном преобразователе 4 с дискретом ![]() и точно – во входном 3 с дискретом
и точно – во входном 3 с дискретом ![]() , т. е. с тем же дискретом, что и в
МЛЗ (рис. 7.1, а).
, т. е. с тем же дискретом, что и в
МЛЗ (рис. 7.1, а).
Если
минимально достижимый в РЛЗ дискрет регулировки задержки ![]() больше требуемого, используют последовательно
подключаемую к ее входу
(или выходам) нониусную ЛЗ. В этой роли чаще всего применяют электрические МЛЗ
на элементах с сосредоточенными или с распределенными постоянными. Общая
задержка нониусной ЛЗ –
больше требуемого, используют последовательно
подключаемую к ее входу
(или выходам) нониусную ЛЗ. В этой роли чаще всего применяют электрические МЛЗ
на элементах с сосредоточенными или с распределенными постоянными. Общая
задержка нониусной ЛЗ – ![]() ; регулировочная
характеристика РЛЗ имеет при этом вид 2, дискрет регулировки равен
дискрету нониусной ЛЗ.
; регулировочная
характеристика РЛЗ имеет при этом вид 2, дискрет регулировки равен
дискрету нониусной ЛЗ.
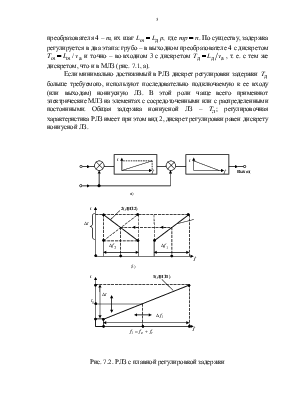
Рис. 7.2. РЛЗ с плавной регулировкой задержки
Значительно усложняется конструкция РЛЗ в режиме плавной регулировки задержки. Известны методы регулировки задержки, основанные на изменении скорости ПАВ за счет управляемого воздействия на условия ее распространения в звукопроводе. Это воздействие осуществляется с помощью изменения значения подводимого электрического поля или переключения нагрузки различных планарных структур, расположенных на поверхности звукопровода. Оба этих варианта позволяют изменять скорость ПАВ (а следовательно, и задержку сигнала) в пределах долей процента и находят ограниченное применение в РЛЗ.
Для плавной регулировки задержки в
широких пределах используют способ, схема реализации которого приведена на
рис. 7.2, а. В ее составе две дисперсионные линии задержки с линейным
законом зависимости задержки от частоты. На графике (рис. 7.2, б)
изображены дисперсионные (девиационные) характеристики обеих ДЛЗ. Они имеют
одинаковую девиацию частоты ![]() и максимальную
задержку
и максимальную
задержку ![]() , но обратный наклон характеристик и
различные центральные частоты. Центральная частота
, но обратный наклон характеристик и
различные центральные частоты. Центральная частота ![]() ДЛЗ
2 равна частоте сигнала
ДЛЗ
2 равна частоте сигнала ![]() ; центральная
частота
; центральная
частота ![]() ДЛЗ 1 может быть выше (как в нашем
случае) или ниже
ДЛЗ 1 может быть выше (как в нашем
случае) или ниже ![]() .
.
Входной сигнал с частотой ![]() подается на смеситель, после
которого поступает на ДЛЗ 1. Частота гетеродина
подается на смеситель, после
которого поступает на ДЛЗ 1. Частота гетеродина ![]() определяет
положение входного сигнала ДЛЗ 1 на частотной оси
определяет
положение входного сигнала ДЛЗ 1 на частотной оси ![]() ,
в нашем случае
,
в нашем случае ![]() ) и таким образом, его
задержку
) и таким образом, его
задержку ![]() на выходе ДЛЗ 1 (рис. 7.2, в).
Второй смеситель осуществляет перенос этого сигнала на исходную частоту
на выходе ДЛЗ 1 (рис. 7.2, в).
Второй смеситель осуществляет перенос этого сигнала на исходную частоту ![]() . В принципе, уже на выходе второго
смесителя мы имеем исходный сигнал, задержка которого может плавно
регулироваться перестройкой частоты гетеродина. Но входной сигнал нашего
устройства имеет строго определенный частотный спектр, который искажается за
счет дисперсионных свойств ДЛЗ 1. Для компенсации этих искажений на выходе
устройства и предусмотрена ДЛЗ 2 с обратным наклоном характеристики 2. Задержка
поступающего на нее сигнала на частоте
. В принципе, уже на выходе второго
смесителя мы имеем исходный сигнал, задержка которого может плавно
регулироваться перестройкой частоты гетеродина. Но входной сигнал нашего
устройства имеет строго определенный частотный спектр, который искажается за
счет дисперсионных свойств ДЛЗ 1. Для компенсации этих искажений на выходе
устройства и предусмотрена ДЛЗ 2 с обратным наклоном характеристики 2. Задержка
поступающего на нее сигнала на частоте ![]() получает
строго постоянное приращение, не зависящее от частоты гетеродина. Однако его
спектральные составляющие получают дополнительные приращения, обратные по знаку
и равные по значению соответствующим приращениям задержки в ДЛЗ 1. Таким
образом, дисперсионные искажения спектра сигнала полностью компенсируются.
получает
строго постоянное приращение, не зависящее от частоты гетеродина. Однако его
спектральные составляющие получают дополнительные приращения, обратные по знаку
и равные по значению соответствующим приращениям задержки в ДЛЗ 1. Таким
образом, дисперсионные искажения спектра сигнала полностью компенсируются.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.