(1): SÌ´{Vi; iÎI}, где I – множество индексов, Vi – объекты системы;
(2): S: X®Y, где xÎX и yÎY – множества входов и выходов;
(3): G: X´Y ®V, где G – оценочная функция; X и Y – входной и выходной объекты; V – оценочный объект системы – множество, частично или полностью упорядоченное отношением предпочтения (например, ³).
Критериальные методы задания отношения Y®V
(1): ![]() ;
;
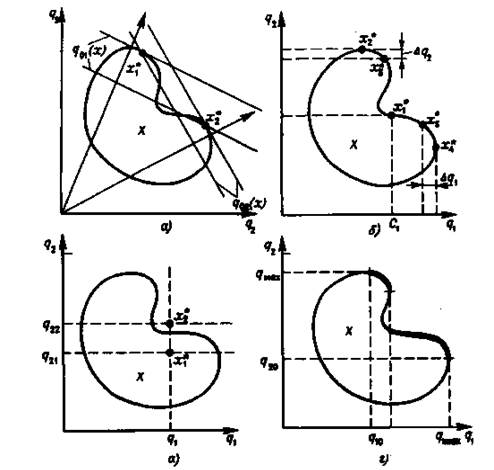
(2): q0(x) = q0
(q1(x), …, qi(x), …, qp(x)), I = 1,..., p; обычно  или
или  ;
;
(3):  или
или  ;
;
(4):  или
или  ;
;
Описание выбора методом бинарных отношений
Непосредственное перечисление всех пар (х, у)
Матричный
способ: матрица R определяется элементами ![]() для всех i
и j;
для всех i
и j;
Граф
предпочтений: 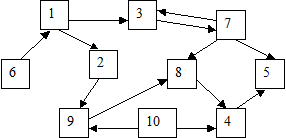 , где
, где ![]() обозначено ®
обозначено ®
Сечения
предпочтений: ![]() – верхнее,
– верхнее, ![]() – нижнее
– нижнее
Отношение Парето: ![]()
Теорема Фишберна: если множество Х конечно и между его элементами имеется отношение строгого порядка Р, то можно построить вещественную функцию u(х) на Х, для которой (х <у) Þ [u(х) < u(у)], причем в левой части < означает отношение предпочтения, в правой – знак "меньше".
Описание выбора методом функций выбора
G – (конечное или бесконечное) множество альтернатив, B – семейство некоторых подмножеств G. Пара (G,B) – обстановка, а элемент Х семейства B – предъявление. Тогда выбор в обстановке (G,B) сопоставляет предъявлению XÎB его подмножество Y=C(X)ÍX, т.е. множество альтернатив xÎX, отобранных из предъявления Х. Отображение Y=C(X) называется функцией выбора. Если BÌ2G, функция выбора называется частичной, если B=2G, то функция выбора называется полной (здесь 2G – множество всех подмножеств множества G).
|
|
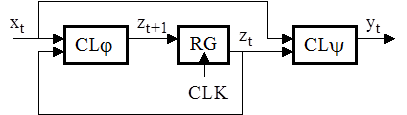
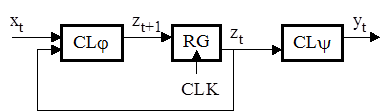
S=<X,
Y>: S=<X, Z, Y> : |
![]()
![]()
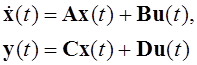
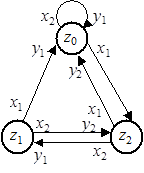
Автомат Мили: z(t+1) = j(x(t), z(t)); y(t) = y (x(t), z(t)).
Автомат Мура: z(t+1) = j(x(t), z(t)); y(t) = y (z(t)).
|
z0 |
z1 |
z2 |
|
|
||||
|
Переходы |
||||||||
|
x1 |
z2 |
z0 |
z0 |
|||||
|
x2 |
z0 |
z2 |
z1 |
|||||
|
Выходы |
||||||||
|
x1 |
y1 |
y1 |
y2 |
|||||
|
x2 |
y1 |
y2 |
y1 |
|||||
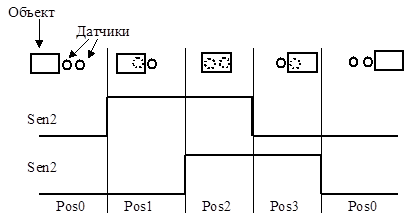
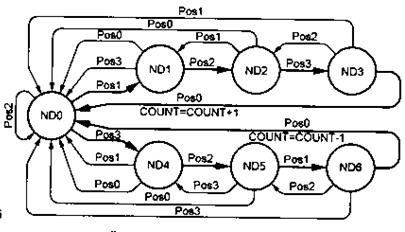
NODE macro pp1,nn1,pp2,nn2,pp3,nn3
local N0 ;Определение локальной метки
N0 movfw SENSORS ;Читаем порт, выделяем биты,
andlw SENS ;состояния датчиков
movwf SensPos ;и запоминаем их
xorlw pp1 ;Если датчики в состоянии рр1,
JZ nn1 ;переходим к вершине nn1
movfw SensPos
xorlw pp2 ;Если датчики в состоянии рр2,
JZ nn2 ;переходим к вершине nn2
movfw SensPos
xorlw ррЗ ;Если датчики в состоянии ррЗ,
JZ nnЗ ;переходим к вершине nnЗ,
goto N0 ;иначе остаемся здесь
endm
![]()

Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.