Динамическая погрешность синхронизации eдин, в случае действия только флуктуационных помех, представляет собой случайную величину, подчиняющуюся гауссовскому закону, и согласно [60] определяется приближенным выражением
 , (3.3)
, (3.3)
где sдин - среднеквадратическое значение динамической погрешности;
sкр - среднеквадратическое значение краевых искажений единичных элементов. Величина динамической погрешности снижается с ростом значений параметров S и kд , т.е. влияние этих параметров на eдинпротивоположно влиянию на статическую погрешность. Следовательно, при конструировании устройств тактовой синхронизации необходим компромисс, который определяется из общего выражения оценки погрешности e:
 . (3.4)
. (3.4)
Время вхождения в синхронизм при максимальной расстройке фаз тактовой частоты (±t0/2) определяется формулой [58]
 ,(3.5)
,(3.5)
где  - скорость манипуляции в радиоканале;
- скорость манипуляции в радиоканале;
tо- длительность элементарной посылки.
Время поддержания синхронизма между двумя подстройками определяется выражением [60]
 , (3.6)
, (3.6)
где m - исправляющая способность приемника, определяемая способом регистрации принимаемых элементарных посылок [33];
eост=Dt/to - остаточная погрешность устройства синхронизации;
Dt - шаг смещения тактового импульса за интервал подстройки (см. рис. 7).
При проектировании устройства тактовой синхронизации его параметры устанавливают из условий допустимых краевых искажений, определяемых исправляющей способностью используемого способа считывания информационных посылок. Повышение устойчивости устройства достигается за счет максимального снижения времени синхронизации tсин.; и - увеличения времени поддержания синхронизма tп.с.
Таким образом решается проблема обеспечения устойчивой работы устройства тактовой синхронизации при прогнозируемых дестабилизирующих факторах: нестабильности местных генераторов тактовой частоты и флуктуационных помехах эфира.
4 Принципы построения систем цикловой синхронизации
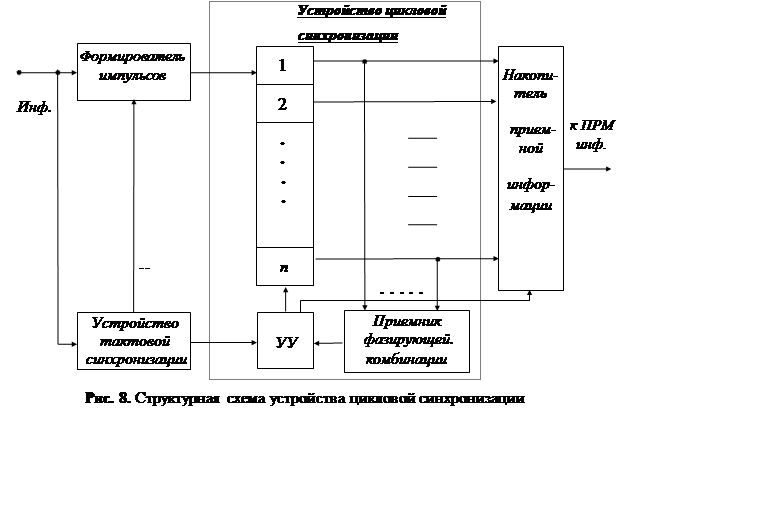
Наиболее слабым звеном приемной аппаратуры автоматизированных радиоканалов является устройство цикловой синхронизации, назначение которого - познаковое разделение последовательности двоичных импульсов. В действующих системах связи используется безмаркерный и маркерный способ цикловой синхронизации.
Безмаркерный способ цикловой синхронизации заключается в следующем. Учитывая использование в цифровых каналах связи равномерных кодов при достаточно малой длине сеанса связи для правильного считывания знаков достаточно однократной метки в начале сеанса‚ после чего запускается цикловая частота и через каждые n тактов осуществляется считывание последующих знаков (рис. 8).
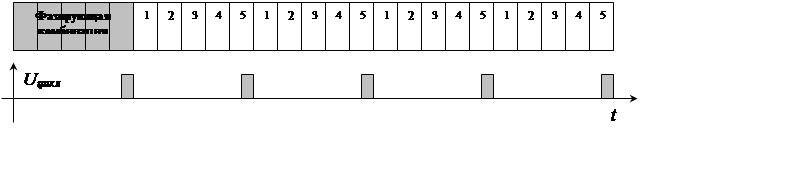 |
Рис. 8. Пояснение работы систем цикловой безмаркерной синхронизации
В скоростных радиоканалах с кратковременной передачей используется безмаркерный метод синхронизации (рис. 9), позволяющий максимально использовать пропускную способность канала.
 |
Другим методом является маркерный способ цикловой синхронизации. Его применение целесообразно для систем, использующих длительные сеансы связи (минуты, часы и более). Например‚ для телефонной связи‚ передачи ТВ и РВ программ и др. Сущность этого метода заключается в передаче маркеров через определенные периоды времени‚ в течение которых работа канала связи обеспечивает его устойчивую работу (рис. 10). В данном случае‚ в отличие от безмаркерного способа‚ поражение или нарушение одного из циклов не нарушает работу канала в целом.
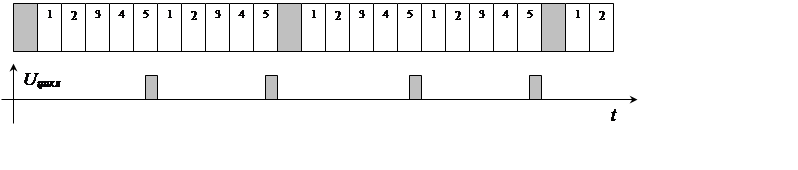
Рис. 10. Пояснение работы систем цикловой маркерной синхронизации
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.