хранения промежуточных вычислений и исходных данных.
5) ПЗУ для хранения программы выполняющую цифровую коррекцию.
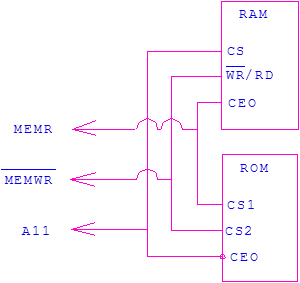
Для коммутации памяти ОЗУ или ПЗУ можно использовать выводы шины адреса А11, (при этом разрядность памяти нужно взять 2048´8) и нам достаточно одиннадцать выводов ША А0-А10. Если сигнал на ША А11=0 то мы работаем с ПЗУ, если А11=1 то с ОЗУ.
Подключение ПЗУ и ОЗУ к системному контроллеру и МП производится с помощью таблиц состояния (в этих таблицах указывается состояние микросхемы в зависимости от того на какие входы микросхемы и какого уровня сигналы подаются) соответствующих микросхем, с таким расчетом что если происходит обращение к одному устройству другое находится в третьем состоянии.
Для обращения к портам ввода и вывода, для уменьшения аппаратных затрат, можно использовать линии ША А12 – А13, объединенные с соответствующими сигнальными линиями системного контроллера с помощью логических элементов, во избежания неоднозначности при обращении к портам.
6) В качестве устройства ввода выступает АЦП К1108ПВ2А. При этом надо организовать обмен данными между процессором и АЦП.
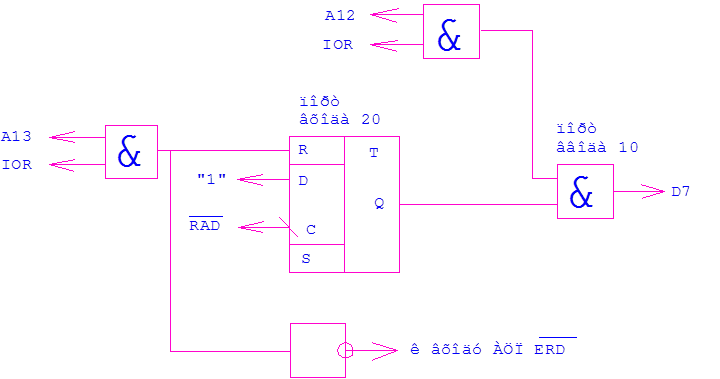
После преобразования аналогового сигнала в цифровой АЦП
подает сигнал ![]() . Чтобы процессор получил этот
сигнал, мы должны организовать схему хранения этого сигнала. В качестве этой
схемы выступает триггер. Триггер соединяем с отводом шины данных D7 через логический ключ. Ключ получает имя: «порт входа
10». Нужно организовать логическую схему обращения к этому порту, схему вывода
данных из порта в МКП и после этого сигнал, обнуляющий триггер. АЦП и триггер
получают названия: «порт входа 20».
. Чтобы процессор получил этот
сигнал, мы должны организовать схему хранения этого сигнала. В качестве этой
схемы выступает триггер. Триггер соединяем с отводом шины данных D7 через логический ключ. Ключ получает имя: «порт входа
10». Нужно организовать логическую схему обращения к этому порту, схему вывода
данных из порта в МКП и после этого сигнал, обнуляющий триггер. АЦП и триггер
получают названия: «порт входа 20».
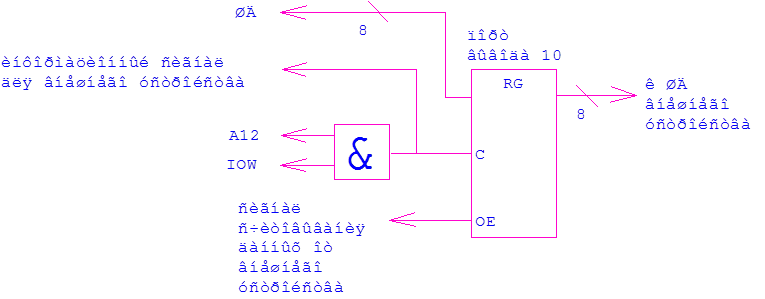
7) Для организации вывода данных во внешнее устройство потребуются: регистр, при этом для записи данных в регистр потребуется подать управляющий сигнал и номер порта вывода. Порт вывода называется: «порт вывода 10».
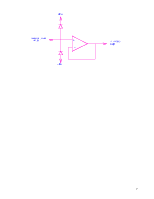
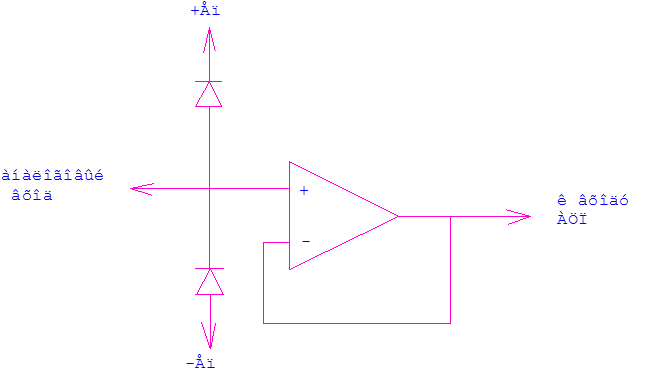
8) Диапазон входного сигнала превышает допустимые значения диапазона входных напряжений АЦП, поэтому на входе устройства нужно поставить схему защиты. +ЕП и -ЕП ограничивают соответственно верхний и нижний уровень входного сигнала. Операционный усилитель развязывает входную цепь и АЦП.
Синтез управляющего узла (разработка программы на языке микропроцессора).
; Курсовая работа
; на тему: Цифровой корректирующий фильтр
; выполнил: ст.гр. 913 Норотов А.В.
; Программа фильтрации сигнала.
;исходные данные
; линейное разностное уравнение У(n-2)=[X(n) - 2X(n-1) + 4X(n-2) - 2X(n-4)]/4 = [X(n) + 2[- X(n-1)] + 2[-X(n-4)]]/4 +
+ X(n-2)
; частота дискретизации Fд = 0.5 (кГц)
; входной сигнал – аналоговый, диапазон изменения (-3..+3)В
; аналого-цифровой преобразователь – К1108ПВ2
; выходной сигнал – 8-разрядныйпараллельный прямой код
; микропроцессор – КР580ВМ80А
;Программа на языке ассемблера.
SPACES ON
XN: .EQU 800H
XN_1: .EQU 802H
XN_2: .EQU 804H
XN_3: .EQU 806H
XN_4: .EQU 808H
P1: .EQU 80AH
P2: .EQU 80CH
S: .EQU 80EH
ADRSP: .EQU FFFH
PORTIN1: .EQU 10H
PORTIN2: .EQU 20H
PORTOUT: .EQU 10H
X: .DW 00H
Y: .DW 00H
Z: .DW 00H
;Подпрограмма начальных установок.
BGN: MACRO
LXI SP,ADRSP
IN PORTIN2
ENDM
;Подпрограмма ввода числа «X» из порта в аккумулятор и преобразование его в дополнительный код с последующим переводом в 2-байтное число. Результат записывается по адресу Х.
VVX: MACRO X
B1#: IN PORTIN1
RAL
JNC B1#
IN PORTIN2
РC_DC
1B_2B
SHLD X
ENDM
;Подпрограмма перевода числа в коде АЦП в дополнительный код.
РC_DC: MACRO
RAL
JNC C1#
CMA
RAR
ADI 1H
RAL
C1#: RAR
ENDM
;Подпрограмма перевода 1-байтного числа в 2-байтное.
1B_2B: MACRO
MOV L,A
RAL
MVI A,0H
SBI 0H
MOV H,A
ENDM
;Подпрограмма умножения числа находящегося по адресу X на 2-а. Результат умножения выводится по адресу Y.
MULTIP: MACRO X,Y
LHLD X
DAD H
SHLD Y
ENDM
;Подпрограмма суммирования 2-х чисел, находящихся по адресу X и Y. Результат выводится по адресу Z.
SUM: MACRO X,Y,Z
LHLD X
XCHG
LHLD Y
DAD D
SHLD Z
ENDM
;Деление на 4-е. Делимое находится в регистровой паре HL. Результат выводится по адресу X.
DELEN4: MACRO X
MOV A,H
RAR
MOV H,A
MOV A,L
RAR
MOV L,A
MOV A,H
RAR
MOV H,A
MOV A,L
RAR
MOV L,A
SHLD X
ENDM
;Перевод 2-х байтного числа в1-байтное. Исходные данные находятся в регистровой паре HL. Результат находится в аккумуляторе.
2B_1B: MACRO
MOV A,H
RAR
MOV H,A
MOV A,L
RAR
MOV L,A
MOV A,H
RAR
MOV H,A
MOV A,L
RAR
ENDM
;Перевод результата вычислений из дополнительного кода в прямой. Исходные данные и результат находятся в аккумуляторе.
DC_PC: MACRO
RAL
JNC D1#
RAR
SUI 1H
RAL
CMA
D1#: RAR
ENDM
;Вывод результата, находящегося в аккумуляторе, в порт.
OUTPUT: MACRO
OUT PORTOUT
ENDM
;Формирование очереди.
OCHARED: MACRO
LHLD XN_3
SHLD XN_4
ENVERT XN_2,XN_3
LHLD XN_1
SHLD XN_2
ENVERT XN,XN_1
ENDM
.CODE
;Подпрограмма изменения знака числа на противоположный.
ENVERT: MACRO X,Y
LDA X
DC_PC
ADI 80H
PC_DC
1B_2B
SHLD Y
ENDM
.CODE
;Основная программа.
ORG 06H
BGN
A1: VVX XN
MULTIP XN_1,P1
MULTIP XN_3,P2
SUM XN,XN_4,S
SUM S,P1,S
SUM S,P2,S
DELEN4 S
SUM S,XN_2,S
2B_1B
DC_PC
OUTPUT
OCHARED
JMP A1
.END
Оценка быстродействия устройства.
Программа
занимает 212 байт в ПЗУ. Максимальное время выполнения программы 749 машинных
тактов или  . Максимальное
время выполнения основного цикла программы 729 машинных тактов или
. Максимальное
время выполнения основного цикла программы 729 машинных тактов или  . При этом время
поступления данных в процессор
. При этом время
поступления данных в процессор  .
.
Составление принципиальной схемы устройства и ее описание.
1)
Для
осуществления синхронизации работы МП нужно к нему подключить генератор
тактовых импульсов КР580ГФ24. К нему должен подключаться кварцевый резонатор с
частотой ![]() (МГц).
(МГц).
2)
Схема
запуска МКП. Вход ![]() подключается к RC цепочке. Емкость должна заряжаться за 20..30 тактов
генератора. Параметры времязадающей цепи следующие:
подключается к RC цепочке. Емкость должна заряжаться за 20..30 тактов
генератора. Параметры времязадающей цепи следующие: ![]() (кОм),
(кОм), ![]() (мФ), диод
(мФ), диод ![]() .
.
3) Системный контроллер и шинный формирователь КР580ВК28 для фиксации слова состояния МП, выработки системных управляющих сигналов, буферизации шины данных и управления направлением передачи данных, а также на случай усовершенствования системы, путем введения дополнительных задач, решаемых процессором.
4) ОЗУ. Исходя из времени обращения к памяти, из малой нагрузочной способности (что позволяет не использовать шинный формирователь) выбираю микросхему КР537РУ10 с организацией 2048´8.
5) ПЗУ. Исходя из аналогичных требований, которые были предъявлены к ОЗУ, выбираю масочное ПЗУ на основе КМОП-структуры КА1603РЕ1 с организацией 2048´8.
6) В качестве устройства ввода выступает АЦП К1108ПВ2А. Для организации обмена данными между процессором и АЦП нам потребуются три инвертора (используем ИМС К561ЛН2, которая содержит шесть инверторов); три логических элемента «и» (используем ИМС К561ЛН2, которая содержит четыре элемента «и»); один «D» триггер (используем ИМС КР1564ЛИ1, которая содержит два триггера).
7) Для организации вывода данных во внешнее устройство потребуются:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.