Исходные данные:
|
Полезное усилие на ленте F, кН |
18 |
|
Скорость ленты, м/сек |
0,6 |
|
Диаметр барабана, мм |
400 |
|
Долговечность зацепления, час |
14000 |
![]()
![]()
![]()
![]()
![]()
![]() Таблица 1
Таблица 1
![]()
![]()
![]()
![]()
![]() 0вал
0вал
![]()
 |
|||
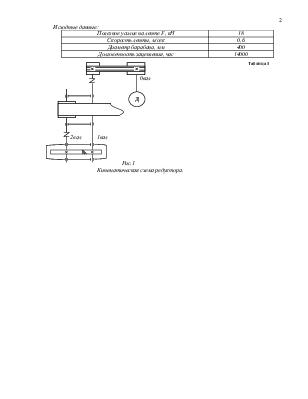
2вал 1вал
Рис.1
Кинематическая схема редуктора.
Введение.
Основная цель курсового проекта – овладеть навыками проектирования. Работа над проектом складывается из выполнения расчетов, рационального выбора материалов и форм деталей, так чтобы обеспечить их высокую экономичность, надежность и долговечность.
![]()
hм=0,97, hподш.=0,99, hцил.пер.=0,98, hрем.пер.=0,96 (Чернавский, табл.1.1, стр.5).

Выбираем двигатель 180М8 асинхронный серии 4А, закрытый, обдуваемый, nсинхр.=750об/мин, Pдв.=15 кВт, S=2,5% (Чернавский п.2.1., стр.390).
Найдём номинальную частоту вращения:

n1=nном

Тогда
 где
где
Uрем.=5 (Чернавский п.1.3., стр.7).
|
Вал |
n, об/мин |
w, c-1 |
T, |
|
0 |
n0=731 |
w0=76,5 |
T0=166 |
|
1 |
n1=146 |
w1=15,3 |
T1=773 |
|
2 |
n2=29 |
w2=3 |
T2=3600 |
Таблица 2


![]()
2. Расчёт закрытой зубчатой передачи:
Шестерни:
Сталь 45, улучш., ![]()
Колесо:
Сталь 45, улучш., ![]()

![]()

Соблюдая ГОСТ 9563-70 выберем:
mn=5 мм
Назначаем предварительно угол наклона зубьев b=10°
Найдём число зубьев шестерни:
Уточним
передаточное число: 
Уточним
угол наклона зубьев: 
Делительные диаметры:

Диаметры вершин зубьев:

Диаметры впадин зубьев:

2.8. Коэффициенты ширины шестерни по диаметру:

Этой скорости соответствует 8-я степень точности (Чернавский, стр.96).

Перегруз менее 5%, допускается.
T2=3,6*106
H*мм; ![]()
(Чернавский табл.3.6., стр.40)
Окружная
Радиальная
Осевая
сила ![]()

Найдём эквивалентное число зубьев:
По ГОСТ 21354-75 (Чернавский, стр.42) назначаем коэффициент формы зуба
yF1=4, yF2=3,6
Допускаемое напряжение изгиба:

Найдём отношение:
Второе отношение больше первого, поэтому в данном зацеплении шестерня будет более слабым звеном, поэтому расчет на выносливость по напряжениям изгиба будем производить только для шестерни:
Коэффициент
компенсации погрешности yb=
Коэффициент торцевого и осевого перекрытия:

Коэффициент
неравномерности нагрузки 
Напряжения
изгиба на шестерне ,
т.е. имеется
запас прочности по напряжениям изгиба
,
т.е. имеется
запас прочности по напряжениям изгиба
3. Расчёт клиноременной передачи:
Исходные данные:
Передаваемая мощность Р=15 кВт
Частота вращения ведущего шкива n0=731 об/мин
Передаточное число up=5
Скольжение
ремня e=0,015![]()
По табл.5.6 (с.69) в зависимости от Т0=166 Н*м рекомендуется выбрать сечение В ремня с площадью поперечного сечения F=230 мм2
По табл.5.6 выбираем d0min=200мм
Для обеспечения большей долговечности ремня рекомендуется брать шкив на 1-2 порядка больше
Из стандартного ряда (с.68) принимаем d0=224мм
![]()
Ближайшее стандартное значение d1=1120 мм

Пересчитываем
Расхождение с заданным Dn1=1.24% (при допускаемом расхождении до 3%)
Итак, принимаем
d0=224 мм
d`=1120 мм
3.6. Ориентировочное межосевое расстояние
Высота сечения клинового ремня по табл.5.6 h=13,5 мм
amin=0.55(d0+d1)+h=0,55(1120+224)+13,5=752,7 мм
amax=2(d0+d1)=2(1120+224)=2688 мм
Принимаем близкое к среднему значению а=1700 мм

Ближайшая по стандарту длина (с.68) L=5600 мм
Вычисляем  и
определяем новое значение а с учетом стандартной длины L:
и
определяем новое значение а с учетом стандартной длины L:

![]()
При монтаже передачи необходимо обеспечить возможность уменьшения а на 0,01L для того, чтобы облегчить надевание ремней на шкив. Для увеличения натяжения ремней необходимо предусмотреть возможность увеличения а на 0,025L
В нашем случае необходимые перемещения составят:
В меньшую сторону 0,01*5600=56 мм
В большую сторону 0,025*5600=140 мм

![]()
n=0,5w0d0=0,5*76,5*224*10-3=8,57 м/с < [n]=25 м/с

Не превышает допускаемое
3.12. Окружное усилие
По табл.5.7 находим величину окружного усилия р0, передаваемого одним клиновым ремнем сечения В:

Допускаемое окружное усилие на один ремень
[p]=p0CaCLCp
Ca=1-0.003(180-a0)=1-0.003(180-150)=0,91
Коэффициент, учитывающий влияние длины ремня
СL=0.3(L/L0)+0.7
Т.к. расчетная длина L=5600=L0, то СL=1
Коэффициент режима работы при спокойном характере нагрузки СР=1
Следовательно [p]=592,17*0,91*1*1=511,6 Н
Определяем окружное усилие, передаваемое комплектом клиновых ремней

3.13. Расчетное число ремней
Примем z=4
3.14. Сила предварительного натяжения одного клинового ремня
Определяем усилия в ременной передаче, приняв напряжение от предварительного натяжения s0=1,6 Н/мм2
Предварительное натяжение каждой ветви ремня
F0=s0F=1,6*230=368 Н
3.15. Силы натяжения ведущей и ведомой ветвей одного клинового ремня
Рабочее натяжение ведущей ветви

Рабочее натяжение ведомой ветви

3.16. Сила давления на вал
Сила давления клиноременной передачи на вал

3.17. Ширина шкивов
Вшк=(z-1)e+2f=(4-1)*25.59+2*17=111
f=17, e=25,5 (табл.7.12)
Ведущий вал экономично выполнить в виде вала шестерни, если передаточное число выше 2,8 – наш случай.
 где Т1=773*103
Н*мм
где Т1=773*103
Н*мм
Для
стали 45 [t]=20![]() 25 МПа, возьмём [t]=20 МПа
25 МПа, возьмём [t]=20 МПа
Принимаем стандартное значение dв1=60 мм (Чернавский, с.296)
По каталогу находим диаметр ротора двигателя dдв=55мм (Чернавский, с.520, табл.П1)
У нас ременная передача, поэтому dв1>0,75dдв, условие выполняется
По табл.11.1 [T]=1000Н*м Из табл.11.5. dм=60мм lм=105
Выбор подшипников для ведущего вала
Т.к. редуктор косозубый, то на оба вала ставятся радиальные шарикоподшипники.
Диаметр вала под подшипниками принимаем dп1=dв1+(5…10)мм=65 мм
Тип подшипника 213, легкой серии. В=23 мм.
Силы, действующие на вал шестерню: Ft=14,5 кH, Fr=5,36 кH, Fa=2,6 кH,
Сила
муфты FM=
Построим эпюру изгибающих моментов Mz в вертикальной плоскости. Предварительно найдем реакции опор



Проверка FB-RB1-RB2+Fr=0
2,86-1,76-6,43+5,36=0
Горизонтальная плоскость
4.2. Подбор подшипника для ведущего вала по динамической грузоподъёмности.
Подбор осуществляется по наиболее нагруженной опоре №2.
Найдём отношение

Найдём эквивалентную нагрузку, действующую на подшипник №2:

Найдём долговечность подшипника:
Вывод: На первый ведущий вал ставим радиальные шарикоподшипники легкой серии №213 ГОСТ2338-75.

Примем dв2=90 мм.
Примем диаметр под подшипники dп2=95 мм.
dk2=100 мм. Выбираем радиальные шарикоподшипники легкой серии №219: В=32 мм, С=108 кН, С0=69,5 кН.
Силы, действующие на колесо: Ft=14,5 кH, Fr=5,36 кH, Fa=2,6 кH,
Сила
муфты FM=
Построим эпюру изгибающих моментов Mz в вертикальной плоскости
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.