Необходимость включения делителя в канал
регулирования скорости следует из того, что формула  для
вычисления электромагнитного момента входит в состав модели объекта управления и
при синтезе регулятора скорости в соответствии с методикой синтеза систем подчиненного
регулирования потокосцепление
для
вычисления электромагнитного момента входит в состав модели объекта управления и
при синтезе регулятора скорости в соответствии с методикой синтеза систем подчиненного
регулирования потокосцепление ![]() входит
в состав знаменателя передаточной функции PC. При однозонном регулировании скорости делитель
не используется. В системах двухзонного регулирования увеличение скорости
происходит при снижении задания на потокосцепление ротора. В этом случае
делитель необходим.
входит
в состав знаменателя передаточной функции PC. При однозонном регулировании скорости делитель
не используется. В системах двухзонного регулирования увеличение скорости
происходит при снижении задания на потокосцепление ротора. В этом случае
делитель необходим.
В тех случаях, когда влияние внутренних обратных связей на динамику электропривода существенно, используют компенсирующие связи, подаваемые на входы регуляторов.
Построение систем согласно рассмотренным вариантам обеспечивает
выполнение условия ![]() в
установившихся режимах в первой зоне регулирования и регулирование
потокосцепления
в
установившихся режимах в первой зоне регулирования и регулирование
потокосцепления ![]() во
второй зоне в соответствии с заданным законом его изменения.
во
второй зоне в соответствии с заданным законом его изменения.
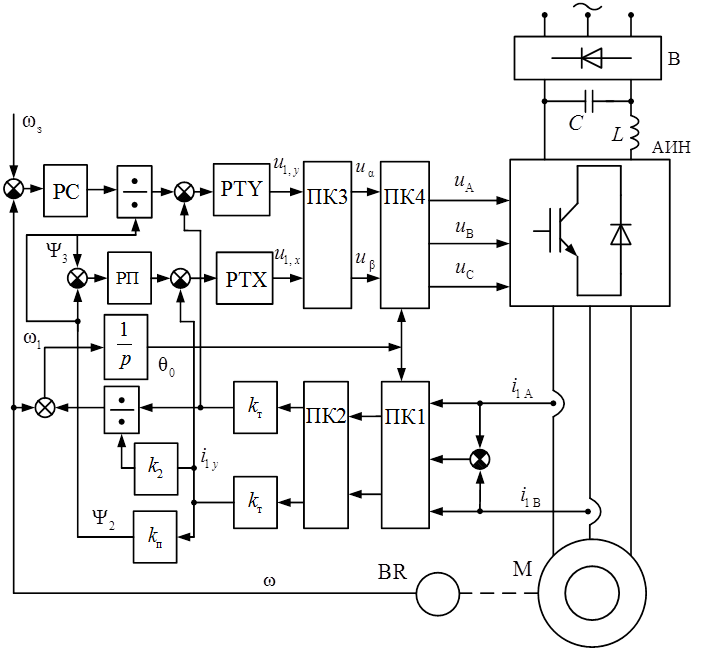
Рис. 3.14. Функциональная схема
системы векторного управления
При однозонном регулировании могут применяться системы, обеспечивающие поддержание заданного тока намагничивания (рис. 3.15). Такая система обеспечивает выполнение условия (3.6).
В системах векторного управления обычно реализуется режим предварительного возбуждения, аналогичный режиму возбуждения двигателя постоянного тока с независимым возбуждением. Для этого подают соответствующий сигнал на вход системы регулирования потокосцепления при нулевом сигнале на входе регулятора скорости. Сигнал задания на скорость подается после достижения установившегося значения потокосцепления ротора.
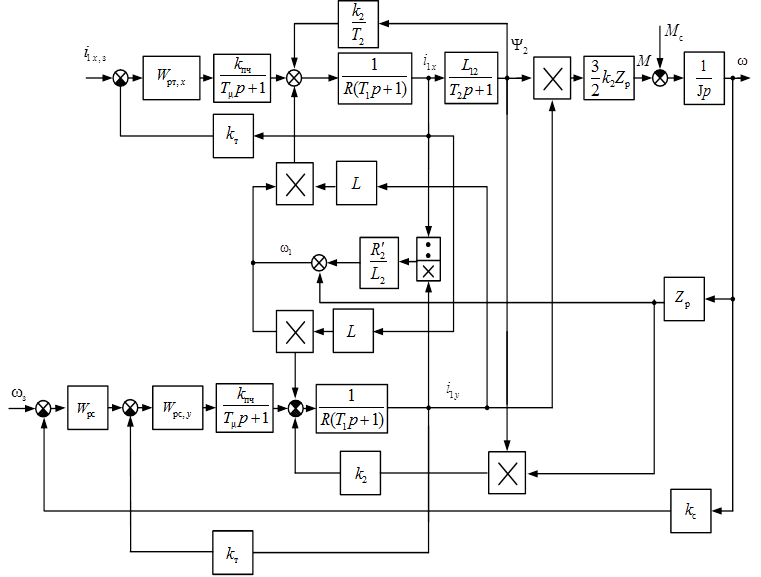
Рис. 3.15. Структурная схема электропривода,
обеспечивающего поддержание ![]()
В этом случае устраняются низкочастотные колебания в контуре скорости, связанные с переходным процессом по потокосцеплению.
3.5. Системы частотно-токового управления
Системами частотно-токового управления называются
системы, в которых в качестве управляющих сигналов используются не
напряжение ![]() и
частота
и
частота ![]() , а ток
статора
, а ток
статора ![]() и
частота.
и
частота.
Подобные системы могут быть построены как с использованием инверторов тока, ток и инверторов напряжения.
При питании двигателя от автономного инвертора тока справедлива схема замещения, приведенная на рис. 3.16, а.
В соответствии с векторной диаграммой (рис. 3.16, б)
![]() .
.
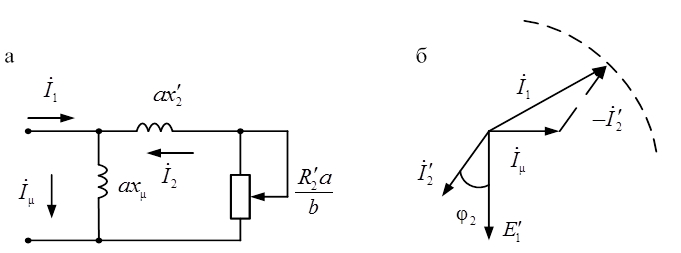
Рис. 3.16. Схема замещения асинхронного двигателя (а)
и векторная диаграмма (б)
Так как
 ,
,
 , то
, то
 .
.
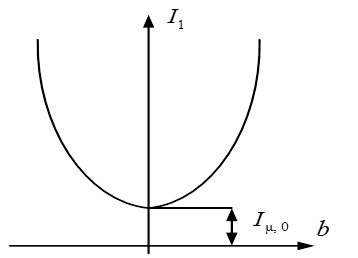
Рис. 3.17. Функциональная зависимость ![]()
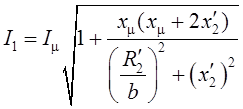
Следовательно, в системах асинхронного электропривода
с частотно-токовым управлением при питании двигателя от инвертора тока необходимо
функционально связать ток статора с величиной абсолютного скольжения в соответствии
с полученным выражением. Графически зависимость ![]() представлена
на рис. 3.17. Здесь
представлена
на рис. 3.17. Здесь ![]() –
значение тока намагничивания в режиме холостого хода.
–
значение тока намагничивания в режиме холостого хода.
Функциональные схемы некоторых вариантов электропривода с частотно-токовым управлением, построенных с использованием инверторов тока, приведены на рис. 3.18 и рис. 3.19. Здесь ФП – функциональный преобразователь. Регуляторы тока настраиваются на модульный оптимум:
Здесь R1, T1 – сопротивление и постоянная времени статора, kт – коэффициент обратной связи по току.
При питания асинхронного двигателя от источника тока структурная схема системы регулирования, представленной на рис. 3.19, соответствует рис. 3.10. Следовательно, регулятор скорости рассчитывается аналогично.
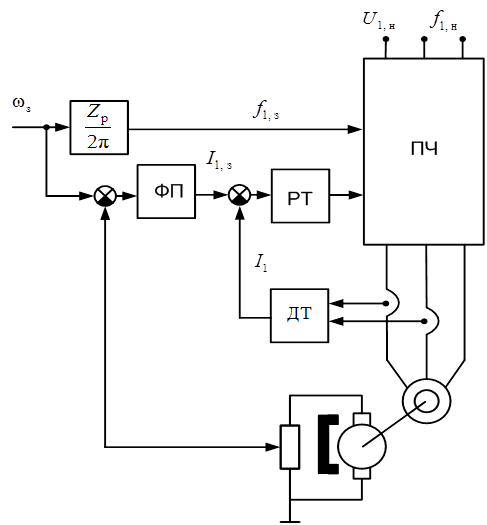
Рис. 3.18. Функциональная схема электропривода
При использовании автономного инвертора напряжения частотно-токовое
управление реализуется при переводе инвертора напряжения в режим источника
тока. С этой целью создаются быстродействующие контуры регулирования фазных
токов на основе регуляторов тока, имеющих характеристику типа «идеальное реле с
гистерезисом». Функциональная схема контуров регулирования тока приведена на рис.
3.20. Здесь ФИУ – формирователи импульсов управления, ![]() –
высокочастотное опорное напряжение.
–
высокочастотное опорное напряжение.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.