Затем, зная кинематические характеристики D, принимая начало направляющей ползуна E в точке C, угол наклона, аналог угловой скорости и аналог углового ускорения направляющей равными нулю, зная длину шатуна DE (звено 4) и длину звена 5, обращаемся к процедуре для группы Ассура второго вида diada2v(dx,dy,vdx,vdy,adx,ady,cx,cy,0,0,0,0,0,0,0,l4,0,fi4,om4,epsi4,l5,v5,a5);.
Последние шесть параметров данной процедуры являются выходными, следовательно определены положение, аналог угловой скорости и аналог углового ускорения звена 4, а также положение ползуна (звено 5), его аналоги скорости и ускорения.
Таким образом, для данного положения начального звена определены все кинематические характеристики механизма. Как уже отмечалось, вывод полученных результатов кинематического анализа нагляднее всего представить графически.
Построение положения механизма начнем с задания положения абсолютной системы координат XAY. Обращаемся к вспомогательной процедуре CoordXY(100,200) и строим координатные оси в точке А(100,200) пикселей. Затем, обращаясь к процедуре Opora, строим условное обозначение опоры. Определяем в пикселях координаты точки B и строим линию AB x1 := ox + round(kl*bx); {kl - масштабный коэффициент длины} y1 := oy - round(kl*by);
MoveTo(ox,oy); {переход в начало системы координат} LineTo(x1,y1); {линия AB}.
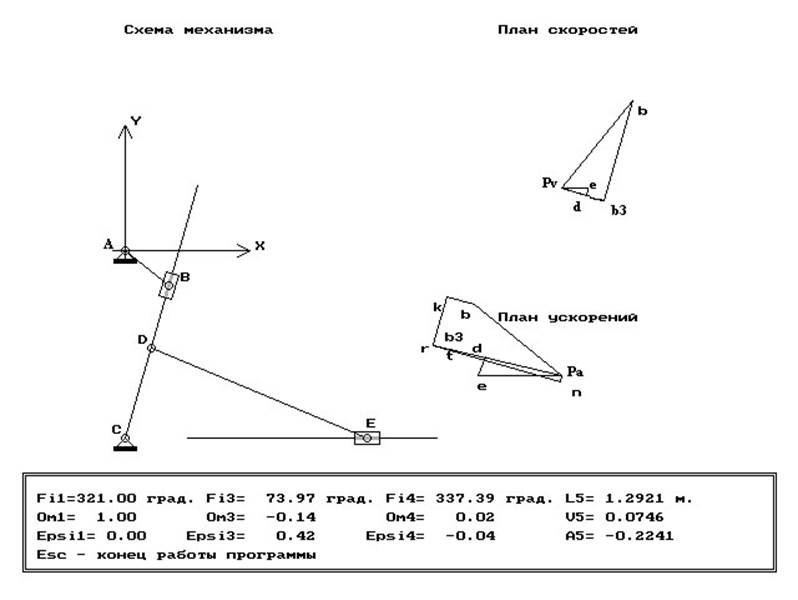
Рис. 6
Далее определяем положение точки C, строим опору и проводим линию наклона кулисы
MoveTo(ox,oy - round(kl*cy));
Circle(ox,oy - round(kl*cy),3); Opora(ox,oy - round(kl*cy));
x1 := ox + round(kl*l30*cos(fi3)); {l30 - длина кулисы} y1 := oy - round(kl*cy) - round(kl*l30*sin(fi3)); LineTo(x1,y1); {линия наклона кулисы}.
Зная координаты точки B, строим при помощи вспомогательной процедуры
PostPara положение поступательной пары B под углом наклона ϕ3 Postpara(ox + round(kl*bx),oy - round(kl*by),fi3);.
Определяем координаты точки D и показываем ее положение
x1 := ox + round(kl*dx); y1 := oy - round(kl*dy); Circle(x1,y1,3);.
Далее определяем координаты точки E, проводим линию DE, линию направляющую ползуна E, строим поступательную и вращательную пары в точке E MoveTo(x1,y1);
x2 := x1 + round(kl*l4*cos(fi4)); y2 := y1 - round(kl*l4*sin(fi4)); LineTo(x2,y2); {линия DE}
Line(ox + 50, y2, ox + 250, y2); {линия направляющей ползуна E} Postpara(x2,y2,0); {поступательная пара E} Circle(x2,y2,3); {вращательная пара E}.
Выбираем координаты полюса плана скоростей pvx,pvy. Далее строим аналог скорости точки В1,2 x1 := pvx + round(kv*vbx); {kv - масшт. коэффициент скорости} y1 := pvy - round(kv*vby);
Line(pvx, pvy, x1, y1); {аналог скорости Vb1,2}.
Далее проводим аналоги относительной Vb3,2 и абсолютной Vb3 скоростей x2 := x1 - round(kv*v3*cos(fi3)); y2 := y1 + round(kv*v3*sin(fi3));
Line(x1,y1,x2,y2); {аналог относительной скорости Vb3,2} Line(pvx,pvy,x2,y2); {аналог абсолютной скорости Vb3}. Определяем аналоги скоростей точек E и D
x1 := pvx + round(kv*v5);
y1 := pvy;
Line(pvx, pvy, x1, y1); {аналог скорости точки E} x2 := pvx + round(kv*vdx);
y2 := pvy - round(kv*vdy);
Line(x1,y1,x2,y2); {аналог относительной скорости Ved}.
Выбираем координаты полюса плана ускорений pax,pay. Проводим линию аналога ускорения точки B1,2 x1 := pax + round(ka*abx); {ka - масштабный коэффициент}
y1 := pay - round(ka*aby); {аналога ускорения} Line(pax,pay,x1,y1); {аналог ускорения B1,2}.
Затем строим аналоги ускорений Кариолиса и релятивного
x2 := x1 + round(ka*2*v3*om3*sin(fi3)); y2 := y1 + round(ka*2*v3*om3*cos(fi3));
Line(x1,y1,x2,y2); {аналог ускорения Кариолиса} x1 := x2 - round(ka*a3*cos(fi3)); y1 := y2 + round(ka*a3*sin(fi3));
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.