Многоканальный бинарный обнаружитель пачек импульсов с динамическим запоминающим устройством
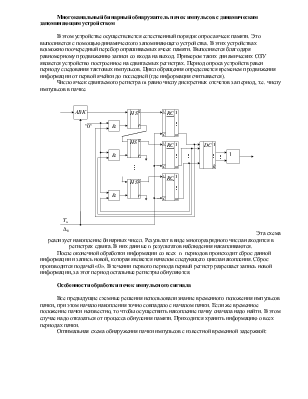
В этом устройстве осуществляется естественный порядок опроса ячеек памяти. Это выполняется с помощью динамического запоминающего устройства. В этих устройствах возможно поочередный перебор опрашиваемых ячеек памяти. Выполняется благодаря равномерному продвижению записи со входа на выход. Примером таких динамических ОЗУ является устройство построенное на сдвигаемых регистрах. Период опроса устройств равен периоду следования тактовых импульсов. Цикл обращения определяется временем продвижения информации от первой ячейки до последней (где информация считывается).
Число ячеек сдвигаемого регистра m равно числу дискретных отсчетов за период, т.е. числу импульсов в пачке.
 Эта схема реализует
накопление бинарных чисел. Результат в виде многоразрядного числа находится в
регистрах сдвига. В них данные n результатов
наблюдения накапливаются.
Эта схема реализует
накопление бинарных чисел. Результат в виде многоразрядного числа находится в
регистрах сдвига. В них данные n результатов
наблюдения накапливаются.
После оконечной обработки информации со всех n периодов происходит сброс данной информации и запись новой, которая является началом следующего цикла накопления. Сброс производится подачей «0». В течении первого периода первый регистр разрешает запись новой информации, за этот период остальные регистры обнуляются.
Особенности обработки печек импульсного сигнала
Все предыдущие схемные решения использовали знание временного положения импульсов пачки, при этом начало накопления точно совпадало с началом пачки. Если же временное положение пачки неизвестно, то чтобы осуществить накопление пачку сначала надо найти. В этом случае надо отказаться от процесса обнуления памяти. Приходится хранить информацию о всех периодах пачки.
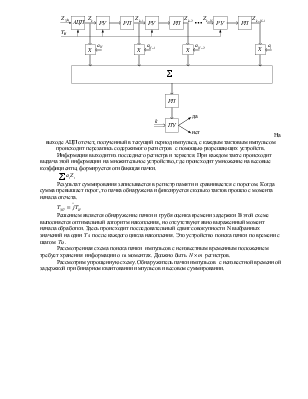
Оптимальная схема обнаружения пачки импульсов с известной временной задержкой:
 На выходе АЦП отсчет,
полученный в текущий период импульса, с каждым тактовым импульсом происходит
перезапись содержимого регистров с помощью разрешающих устройств.
На выходе АЦП отсчет,
полученный в текущий период импульса, с каждым тактовым импульсом происходит
перезапись содержимого регистров с помощью разрешающих устройств.
Информация выходит из последнего регистра и теряется. При каждом такте происходит выдача этой информации на множительное устройство, где происходит умножение на весовые коэффициенты, формируется огибающая пачки.
![]()
Результат суммирования записывается в регистр памяти и сравнивается с порогом. Когда сумма превышает порог, то пачка обнаружена и фиксируется сколько тактов прошло с момента начала отсчета.
![]()
Решением является обнаружение
пачки и грубя оценка времени задержки В этой схеме выполняется оптимальный
алгоритм накопления, но отсутствуют явно выраженный момент начала обработки.
Здесь происходит последовательный сдвиг совокупности N выбранных значений на один ![]() после
каждого цикла накопления. Это устройство поиска пачки по времени с шагом
после
каждого цикла накопления. Это устройство поиска пачки по времени с шагом ![]() .
.
Рассмотренная схема поиска
пачки импульсов с неизвестным временным положением требует хранения
информации о m моментах. Должно
быть ![]() регистров.
регистров.
Рассмотрим упрощенную схему. Обнаружитель пачки импульсов с неизвестной временной задержкой при бинарном квантовании импульсов и весовом суммировании.
Операция АЦП выполняется с
помощью бинарного амплитудного квантователя (БАК). Регистры памяти представляют
собой одноразрядные динамические регистры сдвига. Операция умножения
выполняются с помощью ключей, которые управляются выходами S регистров. Если на всех регистрах «1», то ключ замыкается и
на вход сумматора поступает соответствующее число ![]() из ЗУ.
После выполнения всех N операций
суммирования в каждый дискретный интервал времени результат сравнивается с
порогом К. Если накопленный результат больше К, то пачка импульсов обнаружена.
из ЗУ.
После выполнения всех N операций
суммирования в каждый дискретный интервал времени результат сравнивается с
порогом К. Если накопленный результат больше К, то пачка импульсов обнаружена.
![]() ;
; ![]() , где
, где ![]() - время
задержки пачки,
- время
задержки пачки, ![]() - дискретный интервал в периоде.
- дискретный интервал в периоде.
Построение микропроцессорных дискретных устройств
Особенности построения микропроцессорных устройств
Работа таких устройств заключается в реализации некоторого алгоритма обработки информации. В выполнении упорядоченной последовательности операций над поступающими данными. При построении таких дискретных устройств используют принцип микропрограммного управления, который формулируется как:
1. Любая операция, реализуемая своим устройством, рассматривается как некоторые действия, которые разбиваются на последовательность элементарных действий, называемых микрооперациями.
2. Для управления порядком следования микроопераций используют логические устройства, на выходе которых либо «0», либо «1», в зависимости от результатов выполнения микропрограммы.
3. Процесс выполнения операций в устройстве описывается в форме алгоритма, представляемого в виде микроопераций и логических условий – это микропрограмма.
4. Микропрограмма используется как форма представления принципа функционирования устройства, на основе, которой определяется его структура и порядок работы.
При использовании этого принципа устройства делятся на две части:
ü УА – управляющий автомат
ü ОА – операционный автомат
ОА предназначен для хранения поступающей информации и выполнения заданного набора микроопераций, логических условий.
УА генерирует последовательность управляющих сигналов.
В соответствии с заданной
программой и с учетом логических условий каждый управляющий сигнал ![]() вызывает выполнение микрооперации в ОА. В
общем случае это устройство может быть предназначено для выполнения нескольких
микропрограмм, та или иная выбирается некоторым условием.
вызывает выполнение микрооперации в ОА. В
общем случае это устройство может быть предназначено для выполнения нескольких
микропрограмм, та или иная выбирается некоторым условием.
Все это устройство может быть составной частью более сложной системы, на него могут поступать внешние сигналы управления.
В состав ОА входят типовые функциональные узлы: регистры, сумматоры, АЛУ и т.д. Число элементов памяти ОА определяется разрядностью обрабатываемых данных, эта разрядность может быть достаточно высокой. Но она не влияет на трудоемкость и сложность проектирования. ОА является составной частью устройства. Его состав и структура может быть одинакова для реализации многих алгоритмов. Объем оборудования зависит от сложности реализуемого алгоритма и от структуры автомата, который можно выполнить тремя вариантами:
1) УА с жесткой логикой. Когда все функции реализуются с помощью логических элементов с произвольными связями
2) УА с хранением логики в памяти. Сигналы управления вырабатываются на основе совокупности управляющих слов, находящихся в памяти автомата. Здесь программа используется в явном виде и записывается в ПЗУ. Устройство выполняется на основе БИС с высокой емкостью, это обеспечивает регулируемость структуры автомата и его компактность
3) УА на основе программируемых логических матриц (ПЛМ). Используются БИС ПЛМ. Этот вариант содержит преимущества двух первых.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.