зователей от сети осуществляется через трехфазный анодный реактор, защищающий его от коммутационных токов и коротких замыканий. Управление реверсивного преобразователя — раздельное. Система автоматического регулирования выполнена по двухконтурной схеме подчиненного регулирования с регуляторами скорости и тока.
Питание обмотки возбуждения осуществляется нереверсивным полууправляемым однофазным выпрямителем. Величина тока возбуждения регулируется в зависимости от напряжения якоря.
Разветвленная цепь электронных защит и рабочей диагностики практически исключает выходы из строя элементов преобразователя в аварийных режимах.
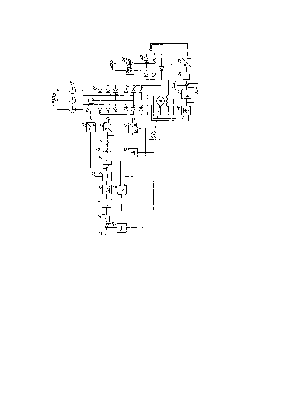
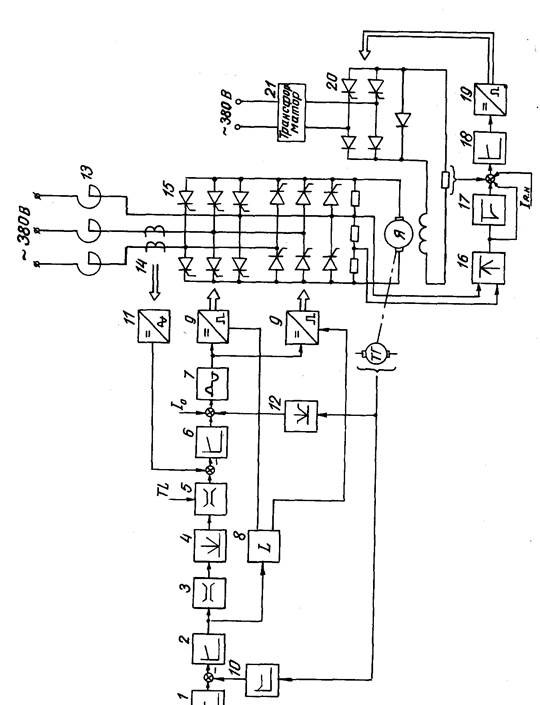
Блок-схема преобразователя приведена на рис. 2.2. Здесь: 1 — задатчик интенсивности разгона и торможения ЗИ; 2—регулятор скорости PC; 3—блок токоог-раничения БТ; 4 — блок модуля задания тока БМТ; 5 — блок ограничения момента БОМ; 6 — регулятор тока РТ; 7 — блок задания тока при нулевой скорости; 8 — логический блок раздельного управления ЛБ; 9 — система импульсно-фазового управления якоря СИФУ(я); 10—корректирующая цепочка КЦЯ; 11 —датчик тока якоря ДТЯ; 12—блок модуля напряжения техогенератора БМТГ; 13—сетевой дроссель Др; 14 — трансформатор тока ТрТ; 15 — реверсивный выпрямитель якорного напряжения ПрЯ; 16 — блок модуля якорного напряжения БМЯ; 17 — корректирующая цепочка КЦВ; 18 — регулятор тока возбуждения РВ; 19 — система импульсно-фазового управления возбуждения СИФУ(в); 20—нереверсивный выпрямитель питания цепи возбуждения ПрВ; 21 — трансформатор питания цепи возбуждения ТрВ.
Описание работы принципиальной схемы электропривода выполним раздельно для цепей управления якорем и возбуждением.
I. Управление якорной цепью
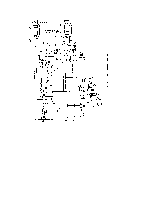
Силовая схема (рис. 2.3) преобразователя якоря выполнена по реверсивной бестрансформаторной трехфазной встречно соединенной мостовой схеме. Защита управляемого выпрямителя от коммутационных перенапряжений выполнена трехфазным анодным реактором в цепи питания ~ 380 В и шунтированием тиристоров RC-цепочками.
Управление группами преобразователя — раздельное. При работе одной группы устройство логики запрещает подачу импульсов управления на другую группу, и наоборот.
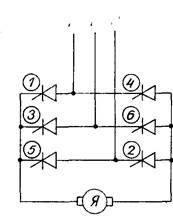
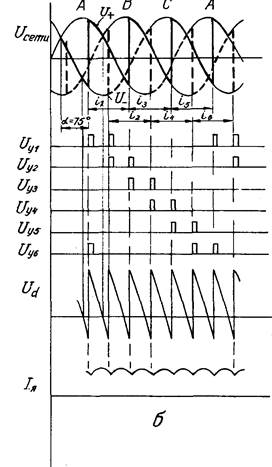
Характерной особенностью трехфазных мостовых управляемых схем выпрямления является необходимость подачи на управляющий электрод одного импульса шириной не менее 60 эл. градусов или двух коротких, подаваемых через 60 эл. градусов. Только при этом обеспечивается условие неразрывности цепи протекания тока, так как в мостовой схеме одновременно проводят ток два вентиля: вентиль, к аноду которого подводится самое положительное напряжение, и вентиль, к катоду которого подводится самое отрицательное напряжение (рис. 2.4).
Первый импульс пары определяет угол открытия тиристора в положительной
|
ЗвОв ЛВС |
|
Питание трансформатора Возбуждения |
|
F1 |
|
«j_ |
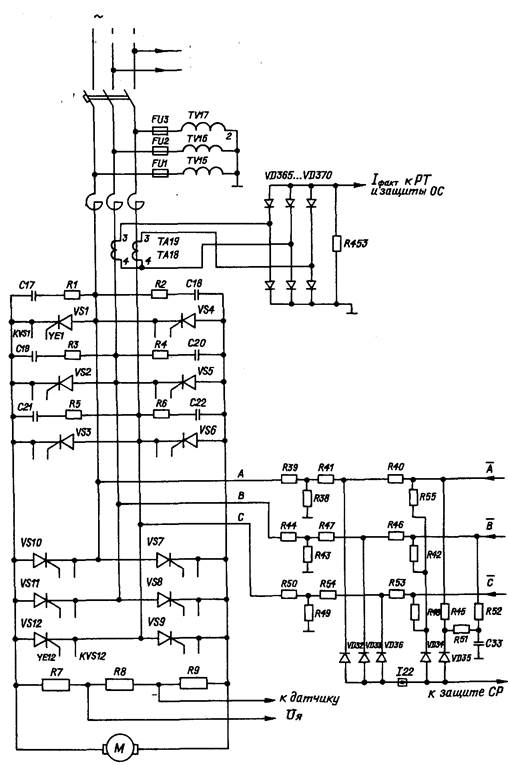
Рис. 2.3. Силовая схема
|
А В С |
|
|
|
а А В С А |
|
•У2 |
|
|
|
|
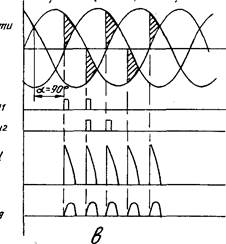
Рис. 2.4. Принципы подачи управляющих импульсов в мостовой схеме выпрямления:
а— схема выпрямления: Ь —режим непрерывного тока (а=75°);
в—режим прерывистого тока (а=90°)
полуволне питающего напряжения, второй — в отрицательной полуволне (режим прерывистого тока). В случае непрерывного тока второй импульс подтверждает необходимость открытия данного тиристора при коммутации других вентилей.
Сдвиг между парами импульсов одной группы (анодной или катодной) — 120 эл. градусов, а между парами импульсов на одной фазе разных групп выпрямителей — 180 эл. градусов.
Частота выходного напряжения якоря в 6 раз превышает частоту сети, что создает благоприятные условия для поддержания непрерывного тока без дополнительных сглаживающих элементов. Принятая на рис. 2.4. нумерация тиристоров соответствует очередности их включения.
Задатчик интенсивности ЗИ предназначен для линейного изменения во време-
|
V, |
|
•ЗаЗ |
|
|
|
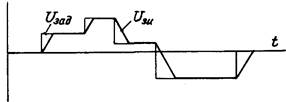
Рис. 2.5. Реакция задатчика интенсивности на ступенчатое изменение задающего сигнала |
|
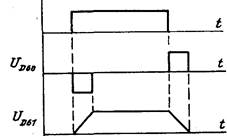
Рис. 2.6. Диаграмма работы ЗИ |
ни входного сигнала регулятора скорости при скачкообразном изменении задающего сигнала (рис. 2.5), чем исключаются броски тока в переходных процессах по каналу управления и плавность разгона и торможения.
ЗИ выполнен на двух операционных усилителях ОУ: компараторе D60 и интеграторе D61 (см. принципиальную схему регуляторов—рис. 2.7).
При скачкообразном изменении задающего напряжения происходит линейное изменение напряжения на выходе ОУ D61 за счет заряда конденсатора С317. Линейно-изменяющееся напряжение по цепи обратной связи R426, R365 подается на неинвертирующий вход компаратора ОУ D60. При равенстве напряжений на входах компаратора происходит фиксация (запоминание) выходного напряжения интегратора ОУ D61 на уровне напряжения задания ±Uзад. Напряжение на выходе компаратора при этом колеблется в районе нуля (рис. 2.6).
Скорость нарастания выходного напряжения ЗИ регулируется потенциометром RP23. Потенциометром RP26 производится балансировка выходного напряжения
компаратора.
Регулятор скорости (рис. 2.7) представляет собой пропорционально-интегральный (ПИ) регулятор и выполнен на операционном усилителе D62. На инвертирующем входе регулятора происходит суммирование управляющего сигнала скорости, поступающего с задатчика интенсивности ЗИ, и сигнала отрицательной обратной связи по скорости, снимаемого с тахогенератора ТГ и имеющего противоположную полярность. Диапазон изменения входного управляющего напряжения от 0 до ±10 В. Реакция регулятора на скачок изменения входного сигнала показана на рис. 2.8.
Балансировка PC осуществляется при помощи потенциометра RP24.
Для удобства проверки и первоначального пуска привода предусмотрено наладочное сопротивление R435, позволяющее сделать регулятор пропорциональным с коэффициентом передачи около единицы (K~1).
Настройка динамических характеристик привода осуществляется изменением коэффициента усиления регулятора потенциометром RP25. В цепи обратной связи по скорости предусмотрена корректирующая цепочка R432, С318, позволяющая подстраивать ускорение и уменьшать перерегулирование (рис. 2.9).
Потенциометром RP22 осуществляется установка максимальной скорости вра-
68
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.