Система многоцелевых схватов является более универсальной по сравнению с системой сменных схватов и подразумевает, в частности, технические решения, которые позволяют ПР манипулировать одновременно несколькими схватами. Это позволяет значительно снизить потери на переналадку ПР, однако, вызывает сложности в решении задачи математического обеспечения системы управления механизмом смены схватов в режиме перепрограммирования. В каждый определенный момент ПР может манипулировать только одним из находящихся в общем многоцелевом блоке схватов, расположенном параллельно или перпендикулярного к плоскости кисти механической руки, на которой он крепится. В противном случае не могут быть обеспечены правильный захват и, как следствие, правильное позиционирование обрабатываемой детали.
Сборочные головки представляют собой исполнительные устройства сборочных РТК, предназначенные для выполнения соединения и закрепления собираемых компонентов. Классификация сборочных головок приведена на рис. 47.
Наиболее совершенными являются головки с автоматической подачей собираемых деталей, оснащенные автоматическими загрузочными устройствами. Сборочные головки могут быть переналаживаемыми и непереналаживаемыми и занимать в пространстве вертикальное, горизонтальное или наклонное положения. Головки могут иметь один или несколько шпинделей, в которых размещаются как сборочные инструменты, так и собираемые детали, а также иметь пневматический, электрический, комбинированный и другие приводы.
Для обеспечения условий сборки применяют различные сборочно-захватные устройства пассивно- и активно-компенсирующего типа или адаптивное управление движениями манипулятора-робота.
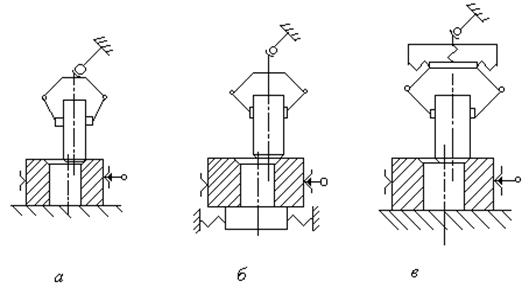
Рис.48. Схемы жесткого (а) и упругого базирования (б,в) собираемых деталей
В отличие от условий жесткого базирования (рис.48, а), при котором активными силами воздействия на деталь являются сборочное усилие P и сила тяжести mg (m - масса присоединяемой детали; g - ускорение свободного падения) условия упругого базирования (рис.48,б,в) характеризуются дополнительным воздействием на сборочные компоненты упругой силой jx или моментом M(jx) сил (j - жесткость упругих элементов; x - координата смещения), благоприятствующих условиям сборки и позволяющих расширить область допустимых начальных смещений объектов сборки. При этом необходимо, чтобы податливость элементов базирования значительно превышала суммарную податливость руки манипулятора.
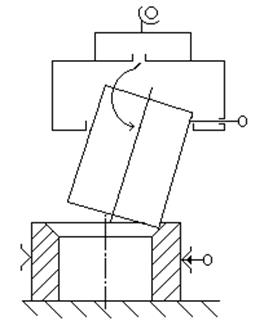
Рис.49. Ориентация с помощью потока газа
Методы активной коррекции подразделяются на поисковые и адаптивные. Примером стохастического поиска является ориентация деталей с помощью вращающегося потока газов (рис.49). Метод основан на газодинамических процессах, происходящих во вращающемся потоке газов и воздействующих на собираемые детали, помещенные в этот поток. В результате происходит совмещение присоединяемой и базовой деталей соответствующих масс под действием центробежной силы, создающей крутящий момент. Метод позволяет осуществлять сборку цилиндрических , резьбовых, шпоночных и шлицевых соединений, обеспечивая высокую производительность сборки.

Рис.50. Схемы траекторного (а) и направленного (б) поиска при сборке
Другим эффективным методом активной коррекции относительного положения объектов сборки является траекторный автопоиск (рис. 50,а). Сущность этого метода заключается в том, что одной из сопрягаемых деталей (иногда обеим) при упругом базировании сообщаются перемещения по заданной траектории, т. е. происходит процесс сканирования области рассогласования объектов сборки, конечной целью которого является компенсация погрешности относительно ориентации и совмещение контуров или геометрических осей сопрягаемых поверхностей.
Параметры траектории ai и шаг Si поиска зависят от величины погрешности ориентации, точности соединения, допустимого смещения и этапа сопряжения объектов сборки. Активными силами служат движущая сила поиска F(t), являющаяся функцией времени и изменяющаяся по периодическому закону, сборочное усилие Pi, а также упругая сила jx базовых элементов, определяемая их жесткостью и величиной деформации при смещении по соответствующей координатной оси.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.