В так называемых полутоновых системах аналоговый видеосигнал оцифровывается с помощью аналого-цифрового преобразователя (АЦП) той или иной разрядности. Обычно используется АЦП разрядностью от 6 до 8, т. е. используется до 256 градаций черно-белого. В бинарных системах объекты наблюдаются в большинстве случаев в проходящем, реже в отраженном свете, наклонное освещение используется для получения теней, по которым можно оценить высоту объекта. Алгоритмы обработки видеоинформации в бинарных системах проще, и скорость обработки соответственно выше. Однако бинарная информация требует тщательно подобранного и стабильного освещения, не позволяет извлекать информацию о внутренних контурах объекта, отличающихся от фоновых, не позволяет работать с перекрещивающимися объектами, а также со сценами с малым контрастом. Многоградационные системы позволяют получить значительно больше информации от объекта (на несколько порядков), но при этом, естественно, требуется больше времени на ее обработку. Современные СТЗ в основном оперируют с многоградационными изображениями. Такие системы в гораздо меньшей степени подвержены влиянию изменений условий освещения, уменьшения контрастности и т. п.
Важным вопросом в СТЗ является место расположения датчика (либо датчиков) видеоинформации. На рис.78 показаны наиболее часто встречающиеся способы расположения видеодатчиков в СТЗ.
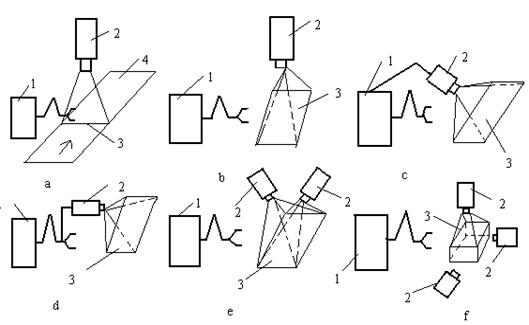
Рис. 78. Способы размещения видеодатчиков в СТЗ: 1 – робот; 2 – видеодатчик;
3 – сигнал распознавания; 4 – конвейер
На рис.78,а показан метод с линейным расположением датчика, располагаемого над движущимся конвейером, по которому перемещается контролируемое изделие. Развертка по кадру в изображении осуществляется за счет движения конвейера. Высокое линейное разрешение датчика позволяет осуществлять точный геометрический контроль изделий, их идентификацию для разбраковки, точное определение местонахождения и ориентацию для взятия. На рис.78,б показан метод с фиксированным матричным датчиком; на рис.78,в подвижный датчик расположен на дополнительной структуре робота; на рис.78,г - метод расположения подвижного датчика на рабочем органа робота, часто на схвате; на рис.78,д два неподвижных датчика находятся под фиксированным углом друг к другу; на рис.78,е три неподвижных датчика используются для получения объемного изображе6ния сцены.
Существующие в настоящее время алгоритмические методы анализа зрительной информации могут быть сведены к одному из трех подходов: методы сопоставления с эталоном, методы классификации (принятия решения) и синтаксические (структурные) методы.
В методах первой группы используется набор эталонов - изображений каждого типа объектов. В процессе классификации анализируемое изображение поточечно сравнивается с каждым эталоном. Результаты сравнения позволяют сделать вывод о принадлежности детали к тому или иному классу, а также о наличии или отсутствии у нее дефектов. Недостатками метода является необходимость точного позиционирования и ориентации объекта относительно видеодатчика, а также отсутствие гибкости при задании критериев контроля, поскольку каждая точка изображения обрабатывается независимо от других.
В методах второй группы изображение описывается в терминах некоторых количественных характеристик, при этом нет необходимости хранить изображение-образец. Классификация (принятие решения) производится на основании результатов статистической обработки данных и вычисления многомерных функций плотности условной вероятности. Данный метод используется при распознавании символов, для обнаружения и идентификации объектов и т. д. Основными этапами обработки видеоинформации здесь являются сегментация изображения, выделение признаков, классификация. Задача этапа сегментации состоит в разбиении изображения на области, соответствующие разным объектам. Известные алгоритмы сегментации основаны либо на анализе сходства характеристик соседних элементов изображения, либо на выделении зон резкого изменения таких характеристик.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.