Схемы этих рисунков могут служить основой для разработки схем квазиоптимальных дискриминаторов, если под операцией суммирования понимать алгебраическое суммирование знакопеременных чисел, т. к. в данном случае коэффициенты bi-j могут быть и положительными, и отрицательными.
 |
Результатом дискриминирования будет являться знакопеременное
 |
,накапливаемое реверсивным счётчиком за время поступления n выборочных значений сигнала {Ji, i=[1,n]}.
Знак dj будет показывать направление смещения строба, а значение – величину смещения.
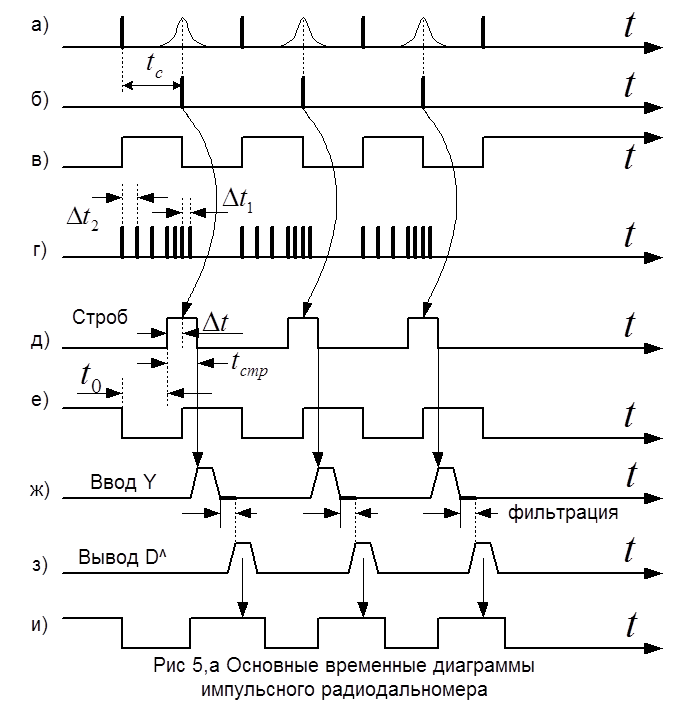
В режиме поиска достаточно определить дальность относительно грубо, а затем в процессе слежения измерять ёё с требуемой точностью. В этом режиме система должна выполнять следующие функции:
1) производить измерения временного интервала Dt (рис. 3.1, д) от начала строба до момента времени, соответствующего точке фиксации принятого сигнала с точностью, определяемой периодом тактовой последовательности.
2) вводить измеренные значения в МП
3) изменять состояние ячейки-накопителя
4) осуществлять фильтрацию приращений значений Dt
5) вычислять полное значение дальности (рис 3.1,б,д,е)
6) выводить полное значение дальности в преобразователь “код-время” для генерирования измерительного строба длительностью tстр.
D^ - оценка дальности на данном шаге, соответствующая временной задержке tс.
 |
 |
 |
Т.е. не более 125 нс.
 |
 |
 |
Вид структурной схемы зависит от типа выбранного нами микропроцессора. Выбирать процессор будем по следующим критериям:
ü требуемое быстродействие (частота дискретизации 8 МГц)
ü требуемая разрядность (>15)
Всем этим требованиям удовлетворяет микропроцессор ADSP-2172. Его основные параметры:
Ø Память программ (RAM), слов.................................................................2к
Ø Память программ (ROM), слов.................................................................8к
Ø Память данных (RAM), слов.....................................................................2к
Ø Максимальная тактовая частота, МГц...................................................16.67
Ø Длина цикла, нсек......................................................................................30
Ø Напряжение питания, В..............................................................................5
Ø Разрядность шины данных........................................................................24
Ø Разрядность шины адреса..........................................................................15
Ø Корпус...........................................................................PQFR128 или TQFR128
За один цикл процессор может:
· Генерировать адрес следующей программной инструкции.
· Загрузить из памяти следующую инструкцию.
· Произвести одну или 2 пересылки данных.
· Обновить один или 2 указателя на данные.
· Произвести вычисление.
Этот процессор будет основным элементом дискриминатора. Подключение внешней памяти не требуется. С учётом того, что данный МП не имеет встроенных портов ввода/вывода, потребуется некоторое усложнение схемы. Для обмена данными между процессором и внешними устройствами потребуется логическая схема селектора адреса и коммутатора сигналов. Для совместимости логических уровней сигналов процессора с внешними устройствами будем использовать преобразователи уровней сигналов (ПУ) (рис 5)
Работа схемы
Каждое внешнее устройство должно иметь свой адрес. Этот адрес должен находиться за пределами адресов встроенной памяти процессора. Если в процессе выполнения программы происходит обращение к одному из внешних устройств, то этот адрес в виде нулей и единиц (бинарный код) появится на шине адреса, к которой подключен селектор адреса. По результатам анализа адреса в селекторе коммутатор подключит нужное внешнее устройство к шине данных. Сигналы управления процессором включают в себя RESET, синхроимпульсы, входы и выходы флагов, и сигналы запроса прерывания. В схеме используется кварцевый резонатор, подсоединённый между входами CLKIN и XTAL. RESET останавливает выполнение инструкций и осуществляет аппаратный сброс. Сигнал RESET устанавливается при включении питания процессора для осуществления правильной инициализации. Хотя начальная загрузка может инициализироваться не только сигналом RESET, но и программно. Сигнал RD (низкого уровня) – чтение данных процессором из памяти. Сигнал WR (низкого уровня) – процесс записи в память. Если DMS (низкого уровня) есть, то на шину адреса поступает адрес памяти данных. Установка бита BFORCE в регистре управления процессором приводит к программной инициализации начальной загрузки. Программная начальная загрузка очищает контекст процессора и инициализирует некоторые регистры. Необходимо также учесть, что после приведения процессора в готовность к работе, незамедлительно должна быть выполнена проверочная программа, которая оценит правильность вычислений микропроцессора. Выходные данные – двоичный код по стандарту RS-232.
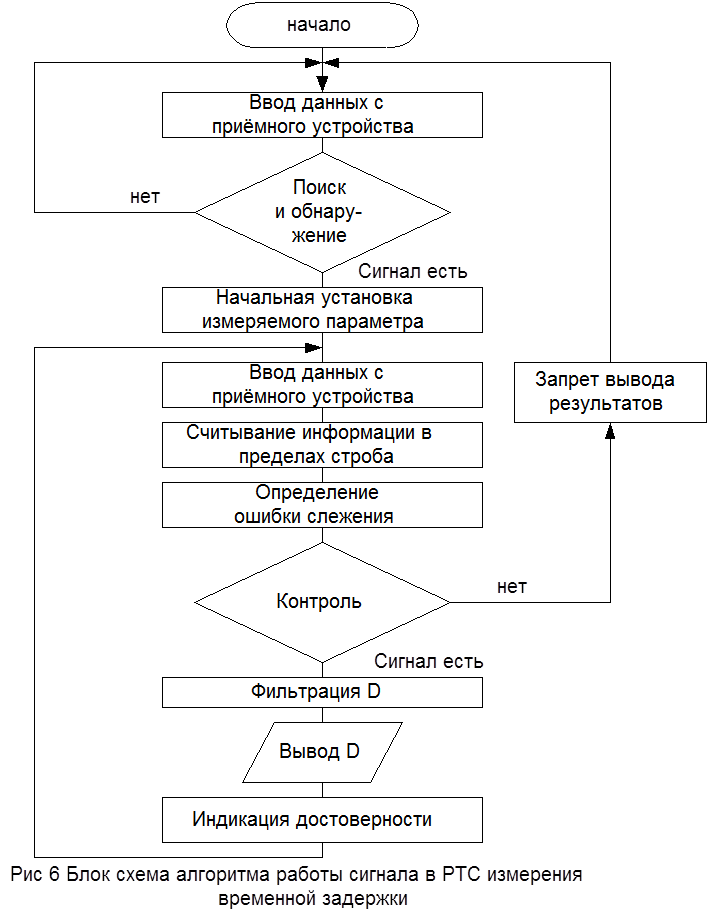 |
вычислительным устройством. Полностью программная реализация, соответствующая структурной схеме на рис 6 возможна только в том случае, если эти операции обмена, а также необходимые вычислительные операции могут быть выполнены в процессе поступления полезных сигналов с приёмного устройства, т. е. в реальном масштабе времени.
Основной операцией в блок схеме является определение ошибки слежения по дальности. До операции определения ошибки слежения 8 отсчётов входного сигнала, считая их начиная с момента tз через каждые 125 нс уже хранятся в памяти.
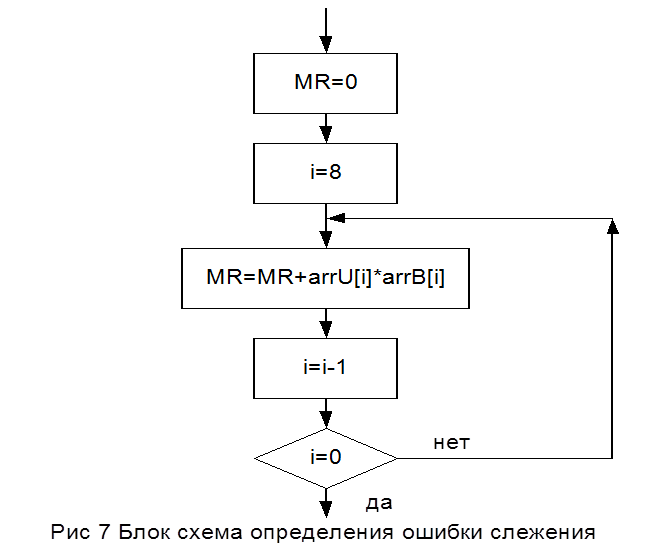 |
Для правильной и корректной работы микропроцессора, а также для увеличения скорости работы, необходимо программу написать на Ассемблере данного семейства цифровых сигнальных процессоров. Текст программы имеет вид:
L0=0;
L1=0;
l0=^arrU;
l1=^arrB;
CNTR=8;
M0=1;
MR=0;
DO lab Until CE
MX0=DM(lo,M0);
MY0=DM(i1,M0);
lab: MR=MR+MX0*MY0(SS);
DM(0x3A00)=MR;
Величина ошибки будет хранится в ячейке 0х3А00.
В данной курсовой работе была рассмотрена реализация импульсного радиодальномера на микропроцессоре с параметрами и характеристиками технического задания. Были рассчитаны все неизвестные параметры, составлены блок-схема алгоритма импульсной РЛС, и программа (её основная часть) режима слежения на языке Ассемблер.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.