Пусть сигнал полностью известен, кроме параметра a. Тогда:

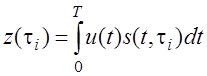
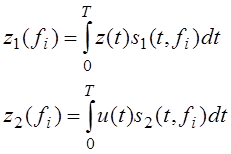
 - корреляционный интеграл
- корреляционный интеграл
![]() - алгоритм правдоподобия
- алгоритм правдоподобия
L(a)- монотонная функция корреляционного интеграла. Оценка a:
![]()
Все это
справедливо для какой-либо реализации u(t) . Оценка параметра a для u(t)
– такая величина, при которой функция правдоподобия (корреляционный интеграл)
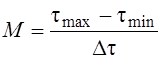
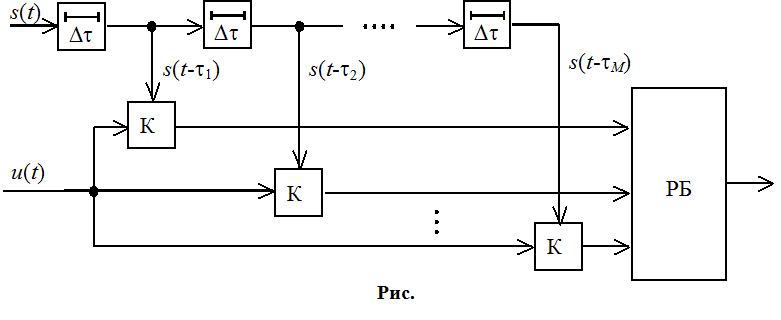
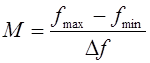
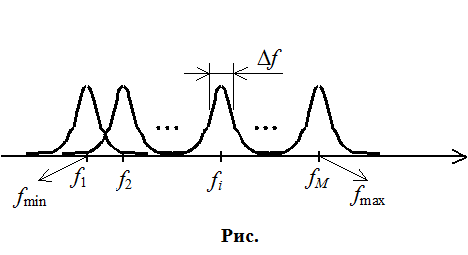
максимальный. Пусть a изменяется от amin до
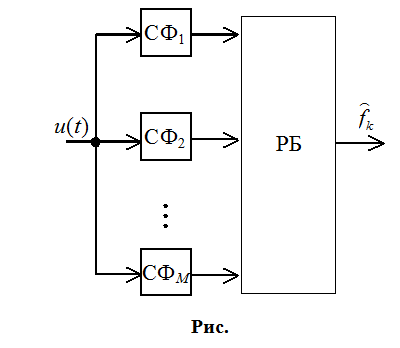
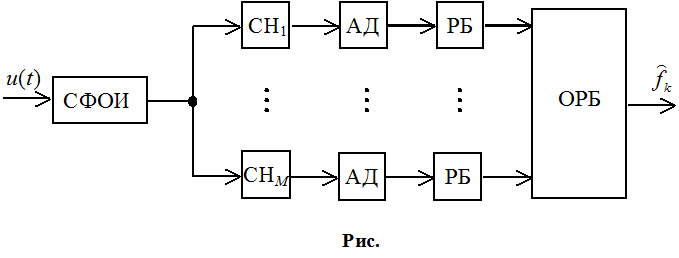
amax Пусть у нас M
интервалов, длина интервала - ![]()
 ;
; ![]()
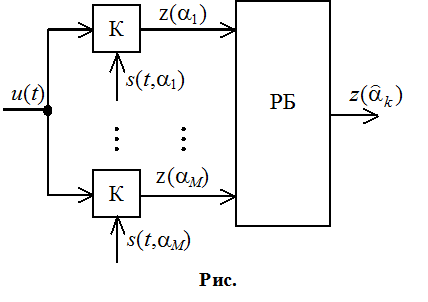
Решающий блок – выбирает максимальную величину.
![]() ,где i=1,2…M
,где i=1,2…M
![]() - выбирают из условия
разрешающей способности. Если параметр непрерывен, то измеритель не
оптимальный. Чем меньше
- выбирают из условия
разрешающей способности. Если параметр непрерывен, то измеритель не
оптимальный. Чем меньше ![]() ,
тем оптимальнее измеритель. Измерение происходит при условии что обнаружение
произошло. Необходимо найти сигнал с максимальной энергией – там цель.
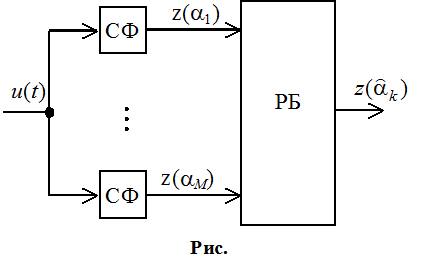
Обнаружение и измерение можно совместить в каждом канале, если ввести некоторый
порог. Таким образом коррелятор, в схеме приведенной выше, можно заменить на
согласованный
фильтр.
,
тем оптимальнее измеритель. Измерение происходит при условии что обнаружение
произошло. Необходимо найти сигнал с максимальной энергией – там цель.
Обнаружение и измерение можно совместить в каждом канале, если ввести некоторый
порог. Таким образом коррелятор, в схеме приведенной выше, можно заменить на
согласованный
фильтр.
![]()
Рассмотрим
время запаздывания: ![]() , тогда наш
сигнал можно представить:
, тогда наш
сигнал можно представить:
![]()
Пусть у нас
интервал ![]() разобьем
его на под интервалы длительностью
разобьем
его на под интервалы длительностью ![]() .
Выберем так чтобы
.
Выберем так чтобы
![]() ;
;  ;
; ![]() , где i=1,2,…,M
, где i=1,2,…,M
![]()
Решающий блок находит максимальную величину:
![]() , где i=1,2,…,M
, где i=1,2,…,M
Можно совместить обнаружение с измерением. Перед тем чтобы что-то делать нужно обнаружить сигнал. Пусть начальная фаза сигнала -j - неизвестная величина, тогда сигнал:
![]()
| ![]() - определяющим является
задержка огибающей. |
- определяющим является
задержка огибающей. |
![]()
Тогда каждый
коррелятор будет двухканальный. Весь диапазон разбиваем на ![]() :
: ![]() ,где i=1,2,…,M :
,где i=1,2,…,M :
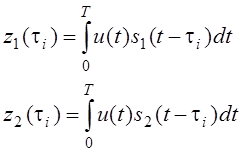
Огибающая
корреляционного интеграла: ![]()
![]() , где i=1,2,…,M
, где i=1,2,…,M
Можно заменить, коррелятор на согласованный фильтр, так как согласованный фильтр инвариантен к времени задержки t.
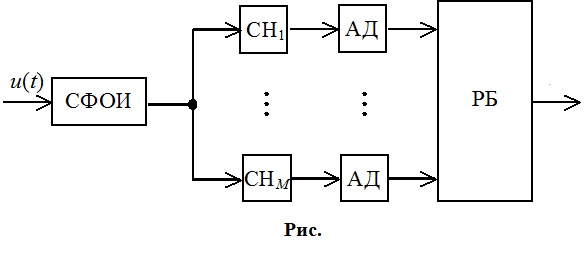
Для некогерентной пачки в схему добавляется синхронный накопитель, он будет находиться между амплитудным детектором и решающим блоком.
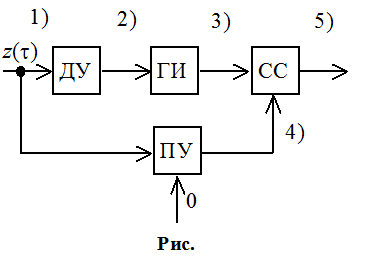
ДУ – дифференцирующие
устройство
ГИ – генератор импульсов
СС – схема сравнения
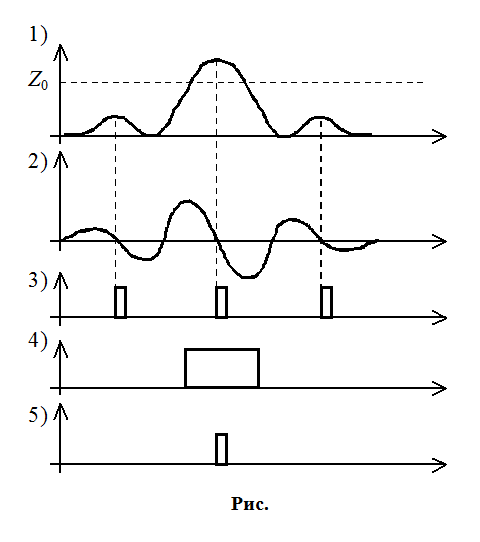
СФ + ГИ + ПУ – оптимальный обнаружитель, остальное оптимальный измеритель. Фиксируется только временное положение сигнала.
![]() - начальная фаза сигнала,
f – неизвестная частота.
- начальная фаза сигнала,
f – неизвестная частота.
![]()
f=FД – частота Доплера.  ;
;  ;
;
Пусть наша частота изменяется в некотором интервале. Разобьем его на под интервалы:
 ;
; ![]() , где i=1,2,…,M
, где i=1,2,…,M
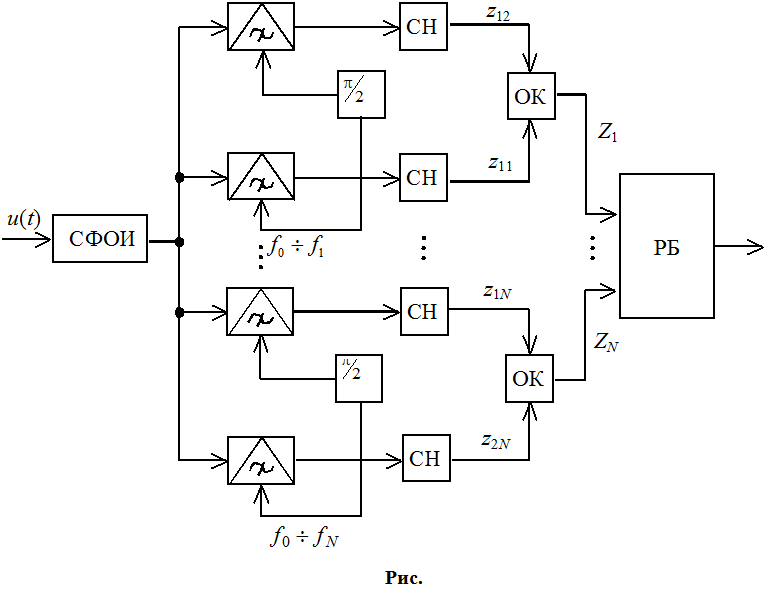
СФ (квадратурные составляющие):
АП (огибающая):
Рассмотрим фильтровой вариант. Фильтр не является инвариантным относительно частоты => схема многоканальная.
Для когерентной пачки:
Схема – многоканальная. Спектр когерентной пачки – гребенчатый.
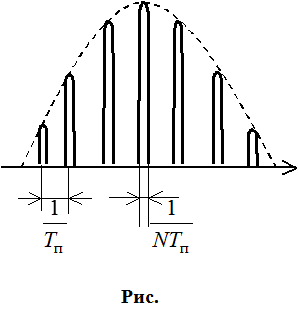
При наличии FД – «гребенка»
смещается. Из-за периодичности спектра
возможны измерения на интервале 2Tп
(![]() ) . Если интервал больше, то
) . Если интервал больше, то
возникает неоднозначность, то есть
лепестки будут неразличимы друг от друга.
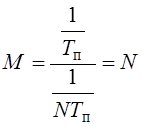 - количество
независимых
- количество
независимых
положений «гребенки»
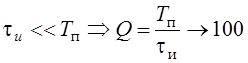 - высокая скважность
- высокая скважность
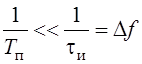 - полоса пропускания УПЧ (или
СФОИ)
- полоса пропускания УПЧ (или
СФОИ)
![]() - интервал однозначности.
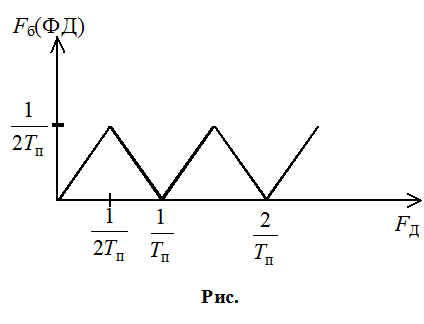
Поэтому СФОИ один для всей схемы. Измеритель на видеочастоте:
- интервал однозначности.
Поэтому СФОИ один для всей схемы. Измеритель на видеочастоте:
стробоскопический эффект Fб (ФД) – частота биения на выходе ФД
Можно
излучать попеременно T1 и T2 ![]()
![]()
При известной начальной фазе нужно вычислить огибающую сигнала.
![]()
 - система уравнения
правдоподобия
- система уравнения
правдоподобия
При
корреляционном варианте в схеме должна обеспечиваться многоканальность по t и по ![]() . Скважность Q<20.
. Скважность Q<20.
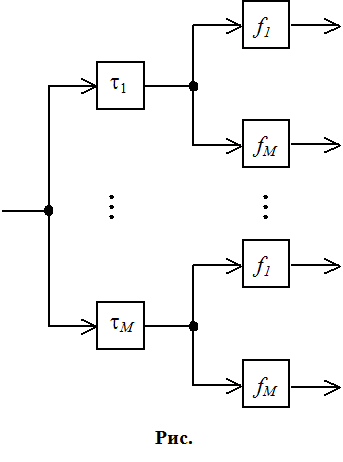
При фильтровом варианте в схеме многоканальность по частоте.
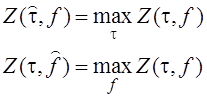
Решающий блок фиксирует максимум временного положения (в сочетании с обнаружением):
![]()
Решающий блок должен выдавать информацию о временном положении импульса. Выдает информацию о номере канала в котором произошло обнаружение
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.