Диапазон измеряемых частот:
НГ 10 Гц – 37,5 ГГц,
Им сигналов 0,1 – 37,5 ГГц;
Уровень входных сигналов:
0,05 – 1 В канал А (10 Гц – 120 МГц)
0,02 – 10 мВт канал Б (0,1 – 2 ГГц)
0,02 – 10 мВт канал В (2 – 37,5 ГГц)
Диапазон по входу В перекрывается тремя выносными смесителями: коаксиальным 7/3,04мм и волноводными 11Х5,5 мм, 7,2Х3,4 мм;
Пределы допускаемой основной погрешности измерения НГ:
где d0=±1,5×10-7 – погрешность внутреннего кварцевого генератора за год;
Пределы допускаемой основной погрешности измерения несущей частоты ИМ сигналов (в зависимости от длительности радиоимпульса) 10-100 кГц;
Питание 220±11 В, 400+28/-12 Гц;
Потребляемая мощность 120 В×А;
Габариты 488Х555Х133 мм;
Масса 25 кг.
IV Ваттметр М-
2.2 Задание необходимых интерфейсных функций. Структура адресов
I Генератор ВЧ Г4-165
Адрес на прием – 21h.
П1 – необходимо для дистанционного программирования;
СП1 – нужна для синхронизации приема;
ДМ1 – необходимо для дистанционного программирования;
Итого: П1,СП1,ДМ1
II Прибор СК3-45
Адрес на прием – 22h, адрес на передачу – 42h.
И1 – необходимо для дистанционной передачи сообщений результатов измерений;
СИ1 – нужна для синхронизации передачи;
П – необходимо для дистанционного программирования;
СП1 – нужна для синхронизации приема;
ДМ1 – необходимо для дистанционного программирования;
Итого: И1,П1,СП1,СИ1,ДМ1
III Частотомер Ч3-71
Адрес на прием – 23h, адрес на передачу – 43h.
И1 – необходимо для дистанционной передачи сообщений результатов измерений;
СП1 – нужна для синхронизации передачи;
П – необходимо для дистанционного программирования;
СП1 – нужна для синхронизации приема;
ДМ1 – необходимо для дистанционного программирования;
Итого: И1,П1,СП1,СИ1,ДМ1
IV Вольтметр В3-63
Адрес на прием – 24h, адрес на передачу – 44h.
И1 – необходимо для дистанционной передачи сообщений результатов измерений;
СП1 – нужна для синхронизации передачи;
П – необходимо для дистанционного программирования;
СП1 – нужна для синхронизации приема;
ДМ1 – необходимо для дистанционного программирования;
Итого: И1,П1,СП1,СИ1,ДМ1
2.3 Состав базового и системного ПО
I Базовое ПО включает в себя следующие модули
1) Драйверы используемых устройств
Основные функции драйверов:
а) Проверка возможности обмена данными б) Обнаружение и коррекция ошибок при передаче в) Конвертирование стандартных команд программирования приборов в специфические команды конкретного прибора г) Считывание, накопление и передача приходящей по шине информации
2) Модуль инициализации и деииициализации а) Проверка работоспособности б) Осуществление перехода в дистанционный/местный режим управления г) Отправление и прием тестовой информации
II Системное ПО включает в себя следующие компоненты
1) Модуль управления приборами а) Блок сопряжения с драйверами устройств б) Программирование на измерение в) формирование нужного алгоритма (последовательности, синхронизации) измерений
2) Модуль математической обработки результатов
3) Модуль интерфейса пользователя и представления данных
2.4 Интерфейс пользователя
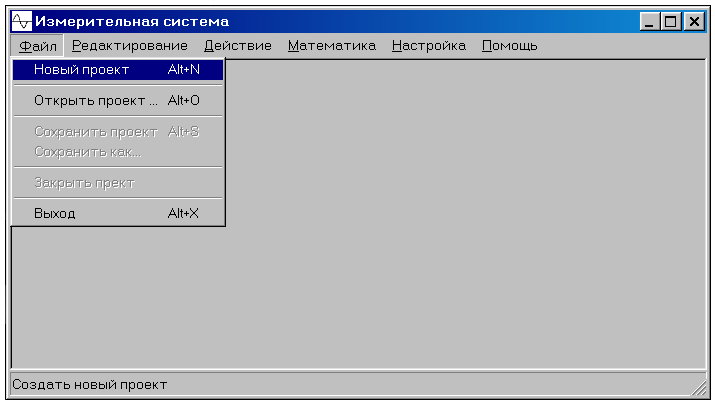
При загрузке программы выводиться главное окно. В верхней части окна находится главное меню. Оно содержит следующие пункты:
Пункт меню “Файл“ содержит стандартные пункты, касающиеся взаимодействия программы с файловой системой компьютера. Если не открыт ни один проект в этом подменю, активными являются пункты “Новый проект”, “Открыть проект” и “Выход”.
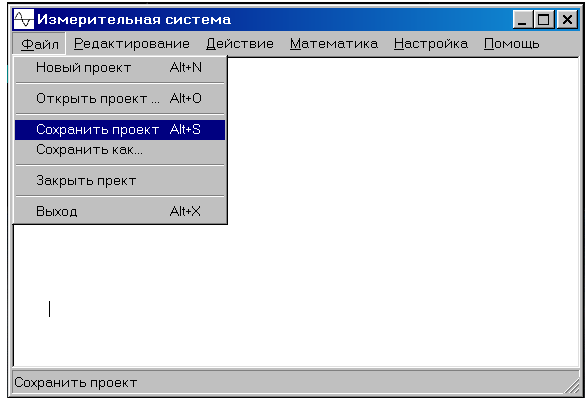
Для задания программы измерений необходимо начать новый проект. При этом открывается текстовый редактор, в котором осуществляется программирование измерительной системы. Так же становятся доступными пункты “Сохранить проект”, “Сохранить как”, “Закрыть проект”.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.