

4. СИНТЕЗ СТРУКТУРНОЙ СХЕМЫ УСТРОЙСТВА ОБРАБОТКИ
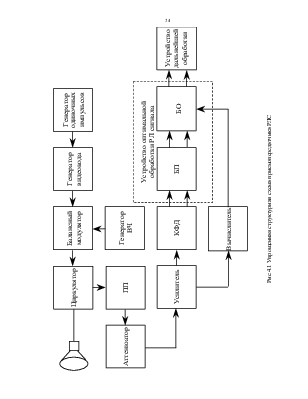
Прежде чем начать разработку функциональной и принципиальной схем устройства, рассмотрим структурную схему приемопередатчика РЛС (рис.4.1).
Принятый РЛ сигнал после циркулятора, развязывающего прием и передачу РЛС, попадает в предварительный приемник (ПП).
После него сигнал промежуточной частоты fп=28 МГц поступает на аттенюатор. Коэффициент передачи аттенюатора изменяется таким образом, чтобы устранить влияние дальности и формы ДН на уровень сигнала.
Далее сигнал после усиления поступает на систему квадратурных фазовых детекторов (КФД). В качестве опорного используется сигнал с частотой 28 МГц. Сигнал после перемножения с опорным поступает на ФНЧ, где для обеспечения условия теоремы Котельникова о дискретизации сигнала ограничивается его спектр. На выходе КФД имеется две квадратурные компоненты, входного РЛ сигнала (рис.4.1).
С выхода КФД сигнал поступает на блок преобразования (БП) типа напряжение-код, состоящего из аналого-цифрового преобразователей (АЦП) для квантования и дискретизации сигнала, где он подвергается квантованию по уровню и дискретизации по времени. Оцифрованный сигнал с частотой выборок 7 МГц поступает на блок обработки (БО). После БО сигнал подвергается дальнейшей обработке.
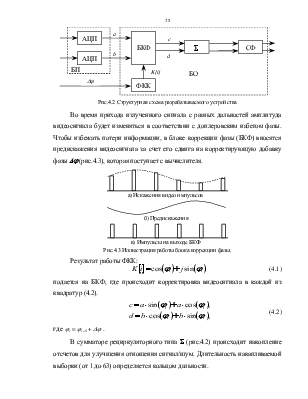
Поскольку разрабатываемое устройство предназначено для выделения и обработки сигнала на фоне некоррелированных помех, оптимальная обработка сводится к согласованной фильтрации (рис.4.2). Устройство согласованной фильтрации предшествует любому устройству обработки в РЛС, в том числе и в системах селекции движущихся целей (СДЦ). Данное устройство позволяет, за счет существенного увеличения отношения сигнал/шум и за счет сжатия используемого ФМ сигнала, увеличить дальность действия (дальность обнаружения и сопровождение по дальности) и разрешающую способность по дальности.

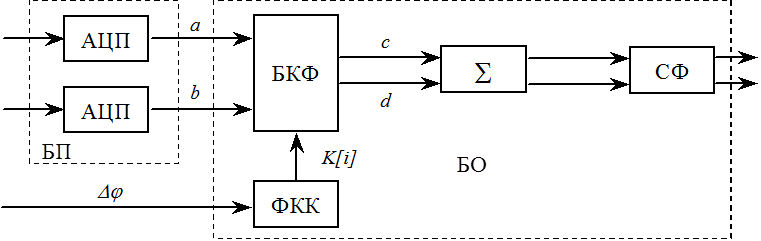
Рис.4.2 Структурная схема разрабатываемого устройства
Во время прихода излученного сигнала с разных дальностей амплитуда видеосигнала будет изменяться в соответствии с доплеровским набегом фазы. Чтобы избежать потери информации, в блоке коррекции фазы (БКФ) вносятся предискажения видеосигнала за счет его сдвига на корректирующую добавку фазы Dj (рис.4.3), которая поступает с вычислителя.

Рис.4.3 Иллюстрация работы блока коррекции фазы.
Результат работы ФКК:
![]() (4.1)
(4.1)
подается на БКФ, где происходит корректировка видеосигнала в каждой из квадратур (4.2).
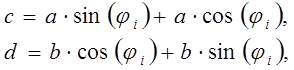 (4.2)
(4.2)
где ![]() .
.
В сумматоре рециркуляторного типа S (рис.4.2) происходит накопление отсчетов для улучшения отношения сигнал/шум. Длительность накапливаемой выборки (от 1 до 63) определяется кольцом дальности.
С выхода сумматора информация поступает на вход согласованного фильтра структурная схема которого представлена на рис 4.4.
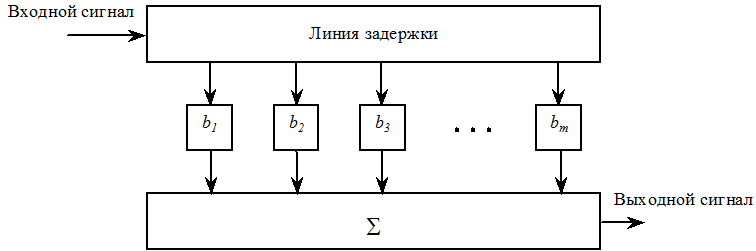
Рис.4.4 Согласованный фильтр
Преимуществом последетекторной (некогерентной) оптимальной обработки является то, что здесь предъявляются менее жесткие требования к величине задержки между отводами линии задержки (ЛЗ).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.