Для реальных ситуаций большой скважности импульсов помехи, средняя энергия импульсов на выходе Пус4 мала по сравнению со средней энергией мешающих продуктов и может привести к неустойчивости процесса уравновешивания, либо к значительному его затягиванию. Для повышения их энергии применяется стробирование в Стр1. Стробирующие импульсы, длительность которых соизмерима с длительностью помеховых импульсов, вырабатываются в блоке управления. Они открывают Стр1 (в их отсутствие его выход отключен от входа). Однако из-за задержки в блоке управления стробирующие импульсы могут оказаться сдвинутыми по времени относительно импульсов на выходе Пус 4.
Для нейтрализации этого роль устройства задержки выполняет двухсторонний пиковый детектор ДПД1. Он представляет собой параллельно включенные пиковые детекторы положительной и отрицательной полярности, выходы которых объединены. На выходе ДПД1 короткие входные импульсы преобразуются в более длинные выходные импульсы той же полярности. Выходные импульсы имеют задний фронт, близкий к экспоненте с достаточно большой постоянной времени Величина постоянной времени выбирается с одной стороны из условия, чтобы за промежуток времени между исходным и стробирующим импульсом амплитуда выходного импульса ДЦД1 не уменьшилась значительно, с другой стороны, чтобы не запоминались выбросы шума, далеко отстоящие по оси времени от исходного импульса.
Таким образом, на выходе Стр1 имеются импульсы того же знака, что и на выходе перемножителя, с амплитудой, в среднем пропорциональной амплитуде исходных импульсов. Второй двухсторонний пиковый детектор ДПД2 служит для растягивания по времени полученных импульсов. При этом уменьшается влияние дрейфа интегратора на полезную составляющую его выходного напряжения.
Второе стробирующее устройство Стр2 управляется тем же сигналом с блока управления, что и коммутаторы. В момент прихода пачки импульсов помехи Стр2 открывается и пропускает сигнал со своего входа на вход интегратора. В отсутствие помехи цепь прохождения сигнала в Стр2 разомкнута. Таким образом, интегратор работает только в период присутствия импульсов помехи, в их отсутствие напряжение на его выходе “запоминается”. При этом удается обеспечить такую постоянную времени, при которой уменьшается влияние его дрейфа и улучшаются условия сохранения результата предыдущих измерений.
Блок управления (рис. 4) предназначен для принятия решения о наличие помехи и формирования соответствующих стробирующих и переключающих напряжений. Он состоит из усилителя (Ус5), подсоединенного ко второму входу, амплитудного детектора (АД), полосового усилителя (ПУс6), порогового устройства (ПУ), формирователя стробирующих импульсов (Форм1), таймера с регулируемой длительностью импульса (Т) и формирователя переключающих напряжений (Форм2). Полоса пропускания ПУс6 выбирается: снизу - из условия фильтрации огибающей быстрых замираний, сверху - из учета максимальной помехоустойчивости. Так же она ограничена полосой, где сосредоточены частотные составляющие, несущие основную энергию импульса (для простого ЧМ сигнала полоса усилителя может быть 1-2 МГц, для составного ~0,5 МГц).
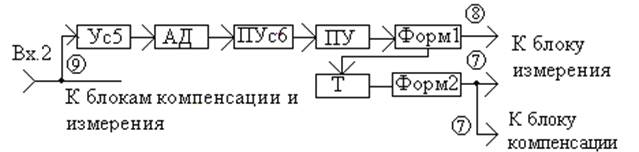 |
Таймер Т служит для ограничения интервала переключения коммутатора (Комм.) длительностью пачки импульсов. Компенсатор также может работать в режиме ручной амплитудно-фазовой подстройки.
* Математическое описание работы компенсатора.
Рассмотрим подробнее как выбираются параметры компенсатора. Первоначально рассмотрим процесс уравновешивания при регулировки весовых коэффициентов в отсутствии полезного ЧМ сигнала. Помеху от РЛС можно представить в виде
y0=UПAои(t)Аоп(t)cos(wПt+yПО),
где ![]() - мощность помехи;
- мощность помехи; ![]() - несущая частота; yПО - начальный фазовый сдвиг;
- несущая частота; yПО - начальный фазовый сдвиг; ![]() - огибающая одиночного импульса;
- огибающая одиночного импульса; ![]() - огибающая пачки импульсов помехи.
- огибающая пачки импульсов помехи.
Форму обеих огибающих излучаемых радиоимпульсов помехи можно в первом приближении принять прямоугольной. В этом случае
где ![]() ,
, ![]() ,
, ![]() ,
, ![]() - период обращения антенны, длительность
пачки, период повторения импульсов и длительность импульса соответственно.
- период обращения антенны, длительность
пачки, период повторения импульсов и длительность импульса соответственно.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.