Рисунок 3.4. Установка тензометрического измерителя расстояния
в гаражном ангаре.
1 - 3. тензодатчики;
4. измерительный блок;
5. блок индикации.
Такой измеритель требует достаточно сложных работ по монтажу датчиков, число которых должно соответствовать числу определяемых зон. Вместе с тем эти тензодатчики могут быть легко повреждены при проведении различных работ в данном помещении.
В связи с этим наиболее целесообразным представляется применение метода ультразвуковой локации.
3.2. Метод ультразвуковой локации.
Ультразвуковые приборы (2) отличаются простотой устройства и удобством эксплуатации; допускают работу в широком диапазоне температур при больших вибрационных и ударных нагрузках; обладают высокой надежностью, безотказностью работы в длительный промежуток времени и достаточно высокой точностью.
Однако сильно затруднено создание эффективных акустических преобразователей, так как при излучении ультразвуковых колебаний из твердых материалов в газ ввиду существенной разницы между акустическими сопротивлениями этих сред происходит значительная потеря энергии на отражение. Это требует большего усиления эхо – сигнала, что усложняет конструкцию прибора. Кроме того, при локации существенное влияние оказывает дифракционное расхождение, приводящее к значительному ослаблению принимаемого звукового сигнала.
Современные ультразвуковые измерители используют в качестве электроакустических вибраторов диски из пьезокерамики или специальных сплавов. Для увеличения мощности излучения диски по определенной технологии склеиваются между собой, а перед диском устанавливается специальное акустическое согласующее устройство (2). Отличительной особенностью современных измерителей является так – же и то, что излучатель и приемник ультразвуковых импульсов объединены в один узел (1).
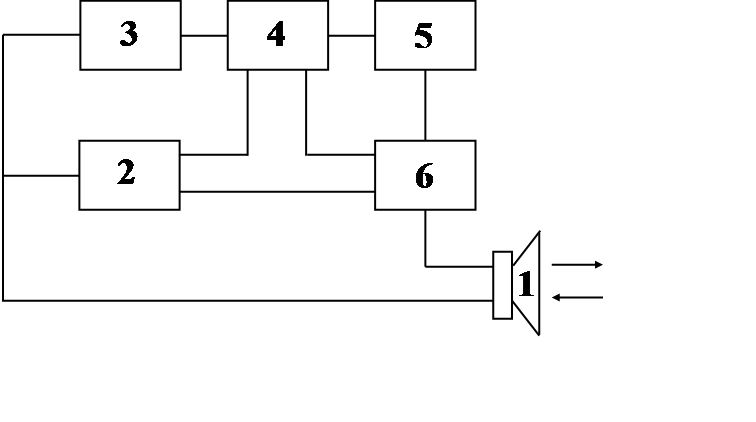
Структурная схема ультразвукового устройства приведена на рисунке 3.5.
Генератор [2] вырабатывает электрические импульсы с определенной частотой повторения, которые преобразуются в ультразвуковые акустическим преобразователем [1]. Импульсы после обратного преобразования усиливаются блоком [3].
 |
для измерения расстояния.
Формирование унифицированного выходного сигнала осуществляется при помощи компенсационного преобразователя, в состав которого входят схема совпадения [4], усилительно – преобразующее устройство [5] и элемент обратной связи [6], представляющий собой блок преобразования напряжения во временной интервал. Выходной сигнал формируется путем автоматического слежения блоком 6 за положением отраженного сигнала. Блок 6 состоит из генератора пилообразного напряжения и компаратора. Пилообразное напряжение подается па один вход компаратора, на другой его вход подается выходное напряжение. Отраженный сигнал с выхода блока [3] и прямоугольные импульсы с выхода блока [6] поступают в схему совпадения [4].
Если фронт отраженного сигнала не совпадает с фронтом прямоугольного импульса, то вырабатывается сигнал разбаланса, который при помощи усилительно – преобразующего устройства изменяет выходной сигнал. Это происходит до тех пор, пока сигнал разбаланса не уменьшится до нуля.
Для метода локации ультразвукового импульса через воздушную среду одним из важнейших факторов является отношение величины принятого эхо – сигнала к уровню помех (уровню шумов). Это отношение регламентирует возможность данного метода, определяет величину так называемой “мертвой зоны”, где не может быть принят сигнал ввиду большого уровня помех, а также определяет максимально фиксируемый уровень (смотри рисунок 3.6.).
Эффект реверберации, или послезвучания, излучающего датчика, когда он одновременно является и приемным (работа на один датчик) будет тем продолжительнее, чем выше добротность датчика.
Как следует из рисунка
3.6., диапазон измерений по времени (и соответственно по расстоянию)
определяется значениями величин ![]() и
и ![]() . При этом он может быть расширен от
. При этом он может быть расширен от ![]() влево, при уменьшении периода передачи
(времени зондирования
влево, при уменьшении периода передачи
(времени зондирования ![]() ) и увеличением
демпфирования датчика (более крутой спад кривой реверберации). С другой
стороны, он может быть расширен от
) и увеличением
демпфирования датчика (более крутой спад кривой реверберации). С другой
стороны, он может быть расширен от ![]() вправо, при
увеличении уровня передаваемого сигнала и снижении уровня помех.
вправо, при
увеличении уровня передаваемого сигнала и снижении уровня помех.
Другим фактором, влияющим
на эффективность работы измерителей, является диапазон рабочих частот.
Оптимальные частоты определяются величинами: ![]() для
воздушной среды (2). При этом необходимо учитывать, что если с увеличением
частоты увеличивается точность отсчета расстояния, то растет поглощение (и
рассеивание) ультразвуковой волны. С уменьшением частоты увеличиваются потери
из – за геометрического расхождения ультразвукового пучка.
для
воздушной среды (2). При этом необходимо учитывать, что если с увеличением
частоты увеличивается точность отсчета расстояния, то растет поглощение (и
рассеивание) ультразвуковой волны. С уменьшением частоты увеличиваются потери
из – за геометрического расхождения ультразвукового пучка.
3.3. Точность измерения.
 ,
,где ![]() - полоса пропускания приемно – усилительного
тракта;
- полоса пропускания приемно – усилительного
тракта;
![]() - отношение сигнал – шум на выходе
детектора.
- отношение сигнал – шум на выходе
детектора.
Погрешность,
вызванная конечным значением фронта сигнала, обусловлена тем, что сигнал на
выходе приемно – усилительного тракта появится не в момент начала импульса, а когда
величина эхо – сигнала достигнет порогового уровня ![]() . При
этом погрешность
. При
этом погрешность ![]() будет определяться:
будет определяться:
 ,
,
где ![]() - амплитуда эхо – сигнала;
- амплитуда эхо – сигнала;
![]() - время установления процесса.
- время установления процесса.
Для повышения точности измерения уровня рекомендуется устанавливать максимально допустимое по условиям работы усиление приемного тракта.
Следующий вид погрешностей связан с нестабильностью генератора счетных импульсов. Для минимизации этих погрешностей генератор счетных импульсов необходимо реализовать на основе кварцевого автогенератора.
При разработке прибора все перечисленные погрешности должны быть учтены с тем чтобы общая погрешность не превышала заданной в ТЗ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.