Материалы лекции № 1.12.
Качество систем автоматического управления.
******
Показатели качества переходного процесса. Прямые методы определения показателей качества (Метод, основанный на использовании операционного исчисления. Частотные методы, основанные на обратном преобразовании Фурье) Связь переходного процесса с вещественной частотной характеристикой системы. Интегральные оценки качества (Линейная интегральная оценка. Квадратичные интегральные оценки.
*****
В предыдущих лекциях были рассмотрены вопросы устойчивости САУ - необходимого условия ее работоспособности, но это условие далеко не исчерпывает всех тех требований, которые предъявляет практика к работе САУ. Применяя критерии устойчивости), описанные ранее, конструктор, вообще говоря, определяет некую область в пространстве параметров разрабатываемой САУ, в которой гарантируется достижение цели. Однако в зависимости от выбора точки в этом пространстве САУ будет работать по-разному, т. е. будут изменяться такие ее характеристики, как переходной процесс, статическая точность системы и другие, объединяемые в понятие качества процесса управления. Выборочно эти характеристики обсуждаются в данных лекциях.
Естественно, что качество процесса управления исследуется при наиболее неблагоприятных для САУ воздействиях, таких как подача на вход системы единичного скачка или единичного импульса. Вообще, вопрос об оценке качества управления (вернее, в рассматриваемых пока моделях регулирования) не так прост, потому что, как правило, различные оценки качества противоречивы. Получив достаточно хорошую оценку по одним показателям, получают менее удовлетворительные по другим, которые хотелось бы иметь более высокими. Таким образом, оценка качества управления — типичная, как говорят в теории операций, многокритериальная задача. Рассмотрение ее увело бы нас весьма далеко от задач, стоящих перед нами задач. Будем считать, что каким-то образом оценка качества выбрана; тогда остается определиться в выборе точки в пространстве параметров регулятора. На этот выбор будут накладываться ограничения двух видов. Первые - гарантирующие условия устойчивости (например, выбор порядка и коэффициентов дифференциального уравнения), второе - налагаемые самой конструктивной схемой регулятора. Эти два вида ограничений и определят допустимую область выбора в пространстве параметров регулятора.
Может оказаться, что ограничивающие условия противоречивы, т. е. множество точек выбора пусто. Это означает, что выбранная конструкция регулятора (система управления) не в состоянии обеспечить достижение цели управления и, следовательно, должна быть заменена другой. В случае если это множество не пусто, то имеет смысл выбирать точку в пространстве параметров регулятора так, чтобы оценка качества управления достигала в ней своего максимально возможного значения.
1.12.1. Показатели качества переходного процесса
 При воздействии на систему
единичного скачка u(t) (см. ранее и приложения) все переменные
устойчивой системы, совершив переходный процесс из одного устойчивого
состояния, приходят в новое установившееся состояние. По характеру зависимости
переходного процесса от времени можно судить о многих важных качествах исследуемой
САУ.
При воздействии на систему
единичного скачка u(t) (см. ранее и приложения) все переменные
устойчивой системы, совершив переходный процесс из одного устойчивого
состояния, приходят в новое установившееся состояние. По характеру зависимости
переходного процесса от времени можно судить о многих важных качествах исследуемой
САУ.
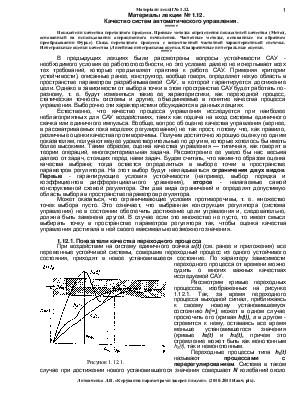
Рассмотрим кривые переходных процессов, изображенных на рисунке 1.12.1. Так, за время переходного процесса выходной сигнал, приближаясь к своему новому установившемуся состоянию h(∞), может в одном случае проскочить его (кривая h(t)), а в другом - стремится к нему, оставаясь все время меньше установившегося значения (кривые h2(t) и h3(t), причем это стремление может быть как монотонным h2(t), так и немонотонным.
Переходные процессы типа h1(t) называют процессами с перерегулированием. Система в таком случае при достижении нового установившегося значения совершает N колебаний около этого значения. На рисунке 1.12.1. N=2. Переходные процессы типа h2(t) и h3(t) называют процессами без перерегулирования.
Следовательно, если имеются промежутки времени, когда h(t) > h(∞), то переходный процесс совершается с перерегулированием. Если h(t) ≤ h(∞), при любом t, то переходный процесс совершается без перерегулирования.
Для оценки переходного процесса, помимо вида кривой, вводят и некоторые количественные величины, являющиеся определяющими параметрами переходного процесса. К таким параметрам относятся:
1) установившееся значение выхода, определяющее статическую точность системы:
![]() (1.12.1)
(1.12.1)
В соотношении (1.12.1) использовано свойство 10 из П4.3 и соотношение (см. материалы соответствующей лекции и п. П.4.4.2. - «Переходная функция»)
 (1.12.2)
(1.12.2)
2) tРЕГ — время переходного процесса, определяющее быстродействие системы (рис. 1.12.1). Оно определяется из соотношения
![]() (1.12.3)
(1.12.3)
где δРЕГ - заданная малая величина, характеризующая точность системы. Обычно принимают δРЕГ ≈ 5 %;
3) σ — величина перерегулирования. Этот параметр характеризует плавность протекания переходного процесса и обычно определяется из соотношения
![]() (1.12.4)
(1.12.4)
4) N - число перерегулирований, или колебательность. Этот параметр определяется как число выбросов для которых
![]() (1.12.5)
(1.12.5)
т. е. число, показывающее, во сколько раз колебания h(t) около нового установившегося значения превышают величину δРЕГ.-Аналогичные показатели вводятся для оценки качества системы по рассогласованию e(t) или ошибке ε(t). Заметим, что по истечении времени, достаточного для затухания переходных процессов (t > tРЕГ), САУ начнет работать в установившемся режиме, и ее поведение будет определяться вынужденной составляющей — частным решением дифференциального уравнения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.