


Федеральное агентство по образованию
Российский Государственный
Профессионально-педагогический Университет
Инженерно-педагогический институт
Кафедра микропроцессорной управляющей вычислительной техники
 |
«Локальные устройства управления»
Лабораторная работа №4
«Построение и исследование нелинейной системы двухпозиционного регулирования»
Выполнили: студенты группы ВТ-415
Смирнов И.В.
Шайдуров А.П.
Проверил: преподаватель
Окунев Е.А.
Екатеринбург
«2007»
Лабораторная работа № 4.
«Построение и исследование нелинейной системы двухпозиционного регулирования»
Цель работы: Исследование свойств нелинейной системы двухпозиционного регулирования с настраиваемой зоной возврата регулятора. Оценка влияния параметров настройки регулятора на показатели качества регулирования.
Общие сведения:
Функциональная схема нелинейной системы регулирования.
Основным элементом двухпозиционного регулятора является реле.
Без зоны возврата.
С регулируемой зоной возврата.
ε – сигнал рассогласования
ε = Xзд – X
В ПРОТАР для реализации релейного элемента используют один из компараторов К1, при этом точка включения определяется J2, а точка выключения зоной ∂j , при J2 – Xзд ∂j=0 будет без зоны возврата. При J2=Xзд+∂j/2.
Программно-логическая модель исследования системы.

Хзд = 220
Хмах = 440
Увкл =
Уручн =
Увыкл =
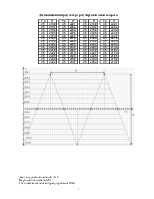
Результаты работы:
1) J2 = 0, ∂j= 0
2) J2 = 5, ∂j= 10
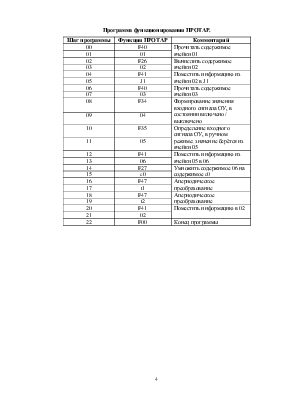
Программа функционирования ПРОТАР.
|
Шаг программы |
Функция ПРОТАР |
Комментарий |
|
00 |
F40 |
Прочитать содержимое ячейки 01 |
|
01 |
01 |
|
|
02 |
F26 |
Вычислить содержимое ячейки 02 |
|
03 |
02 |
|
|
04 |
F41 |
Поместить информацию из ячейки 02 в J1 |
|
05 |
J1 |
|
|
06 |
F40 |
Прочитать содержимое ячейки 03 |
|
07 |
03 |
|
|
08 |
F34 |
Формирование значения входного сигнала ОУ, в состоянии включено / выключено |
|
09 |
04 |
|
|
10 |
F35 |
Определение входного сигнала ОУ, в ручном режиме; значение берётся из ячейки 05 |
|
11 |
05 |
|
|
12 |
F41 |
Поместить информацию из ячейки 05 в 06 |
|
13 |
06 |
|
|
14 |
F27 |
Умножить содержимое 06 на содержимое c0 |
|
15 |
c0 |
|
|
16 |
F47 |
Апериодическое преобразование |
|
17 |
t1 |
|
|
18 |
F47 |
Апериодическое преобразование |
|
19 |
t2 |
|
|
20 |
F41 |
Поместить информацию в 02 |
|
21 |
02 |
|
|
22 |
F00 |
Конец программы |
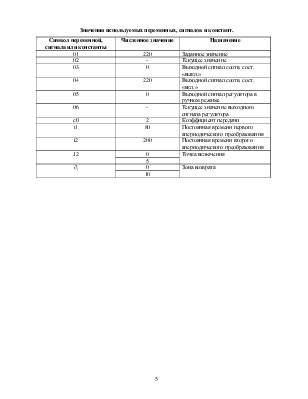
Значения используемых переменных, сигналов и констант.
|
Символ переменной, сигнала или константы |
Численное значение |
Назначение |
|
01 |
220 |
Заданное значение |
|
02 |
- |
Текущее значение |
|
03 |
0 |
Выходной сигнал соотв. сост. «выкл.» |
|
04 |
220 |
Выходной сигнал соотв. сост. «вкл.» |
|
05 |
0 |
Выходной сигнал регулятора в ручном режиме |
|
06 |
- |
Текущее значение выходного сигнала регулятора |
|
с0 |
2 |
Коэффициент передачи |
|
t1 |
80 |
Постоянная времени первого апериодического преобразования |
|
t2 |
200 |
Постоянная времени второго апериодического преобразования |
|
J2 |
0 |
Точка включения |
|
5 |
||
|
∂j |
0 |
Зона возврата |
|
10 |
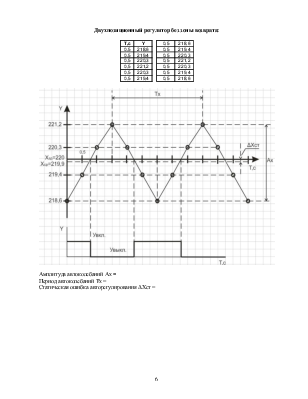
Двухпозиционный регулятор без зоны возврата:
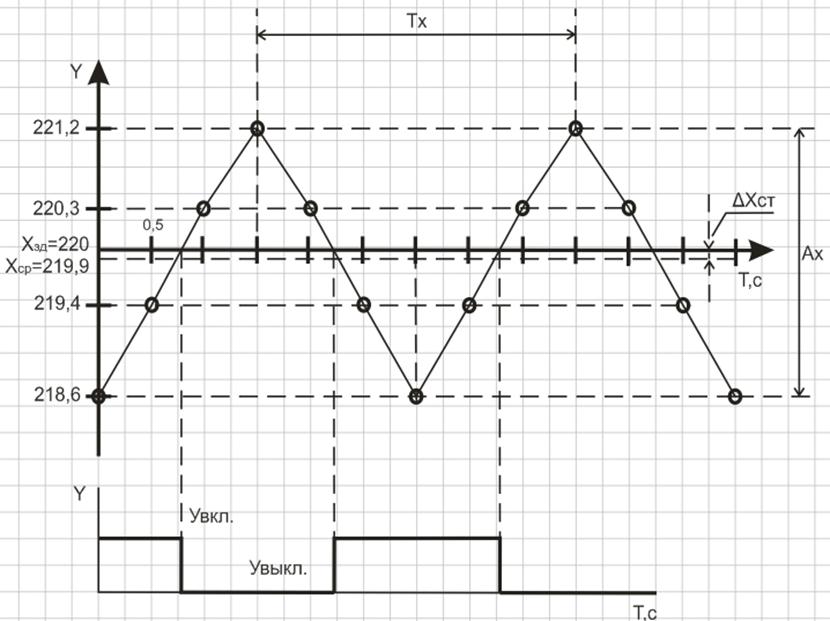
Амплитуда автоколебаний Ах =
Период автоколебаний Тх =
Статическая ошибка авторегулирования ΔХст =
Двухпозиционный регулятор c регулируемой зоной возврата:
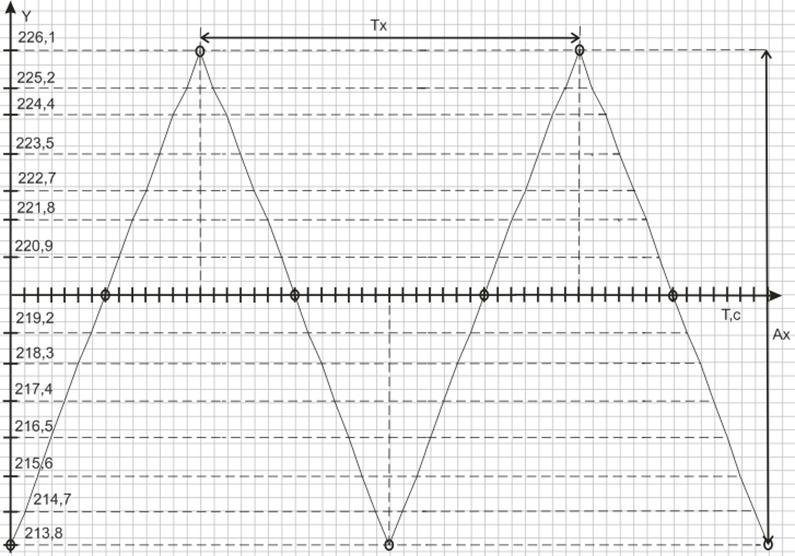
Амплитуда автоколебаний Ах =
Период автоколебаний Тх =
Статическая ошибка авторегулирования ΔХст =
Вывод:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.