

Лекция 11
По методичке л/р №71
6.3. Реостатное торможение с независимым возбуждением.
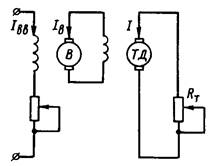
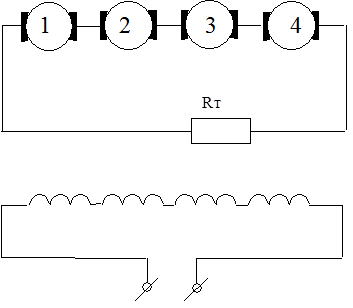
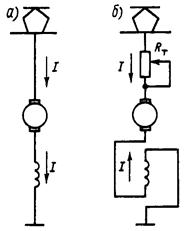
Для реостатного торможения с независимым возбуждением необходимо, как и для реостатного торможения с самовозбуждением, реверсировать ТД и замкнуть его на тормозной резистор. Для данного типа торможения производят реверсирование только обмоток возбуждения, так как они запитываются от постороннего источника (возбудителя). В качестве возбудителя постороннего источника может быть использовано:
- вращающийся преобразователь (ЭТ2 и их аналоги);
- тяговый трансформатор (ВЛ80С, ВЛ80Т);
- контактная сеть (троллейбусы, трамваи);
- аккумуляторная батарея или ступень тормозного резистора (ЧС2Т, ЧС6, ЧС200.
Так как обмотки возбуждения тяговых двигателей имеют малое сопротивление и число витков, то особенностью возбудителя является низкий уровень напряжения на выходе (до 100 В), но значительные токи (до 1000 А).
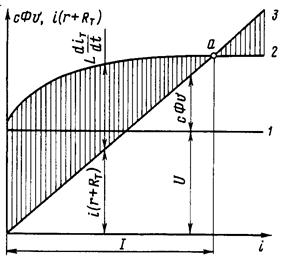
 Запишем уравнение для
тока, протекающего по тормозному контуру:
Запишем уравнение для
тока, протекающего по тормозному контуру:
 .
.
ТД создает тормозную силу
 ,
,
где hВ – коэффициент, учитывающий влияние механических и магнитных потерь в ТД на тормозную силу. Совмещая приведенные выше формулы, получим:
 .
.
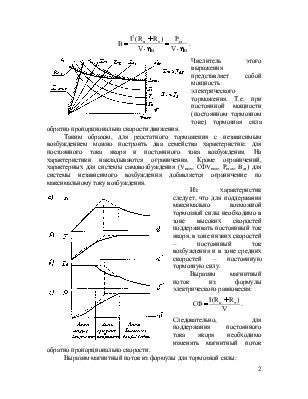
Из формулы следует, что при постоянном магнитном потоке, а при независимом возбуждении это возможно, т.е. при постоянном токе возбуждения, тормозная сила прямо пропорциональна скорости движения. Наклон характеристики к оси скорости зависит от величины тормозного резистора.
Если выразить магнитный поток из первой формулы и подставить его в формулу для тормозной силы, то получим:
 .
.
 Числитель этого выражения
представляет собой мощность электрического торможения. Т.е. при постоянной
мощности (постоянном тормозном токе) тормозная сила обратно пропорциональна скорости
движения.
Числитель этого выражения
представляет собой мощность электрического торможения. Т.е. при постоянной
мощности (постоянном тормозном токе) тормозная сила обратно пропорциональна скорости
движения.
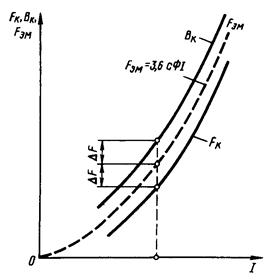
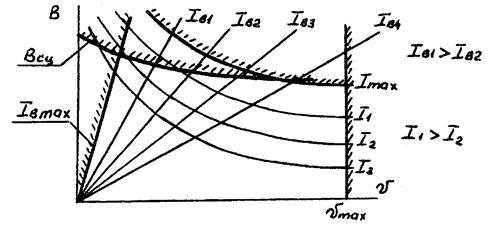
Таким образом, для реостатного торможения с независимым возбуждением можно построить два семейства характеристик: для постоянного тока якоря и постоянного тока возбуждения. На характеристики накладываются ограничения. Кроме ограничений, характерных для системы самовозбуждения (Vmax, CФVmax, Рmax, Bсц) для системы независимого возбуждения добавляется ограничение по максимальному току возбуждения.
 Из характеристик следует,
что для поддержания максимально возможной тормозной силы необходимо в зоне высоких
скоростей поддерживать постоянный ток якоря, в зоне низких скоростей – постоянный
ток возбуждения и в зоне средних скоростей – постоянную тормозную силу.
Из характеристик следует,
что для поддержания максимально возможной тормозной силы необходимо в зоне высоких
скоростей поддерживать постоянный ток якоря, в зоне низких скоростей – постоянный
ток возбуждения и в зоне средних скоростей – постоянную тормозную силу.
Выразим магнитный поток из формулы электрического равновесия:
 .
.
Следовательно, для поддержания постоянного тока якоря необходимо изменять магнитный поток обратно пропорционально скорости.
Выразим магнитный поток из формулы для тормозной силы:
 .
.
Следовательно, для поддержания постоянной тормозной силы необходимо изменять магнитный поток обратно пропорционально корню квадратному из скорости.
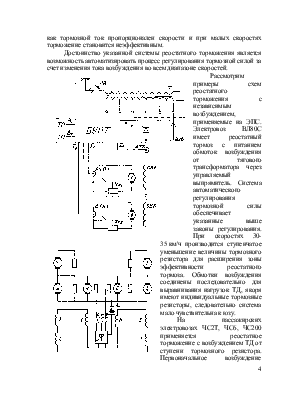
Из формулы для тока якоря
следует, что при постоянном магнитном потоке ток якоря пропорционален скорости, но так как в зоне низких скоростей магнитная система ТД близка к насыщению, то зависимость I = ¦(V) будет близка по форме к характеристике намагничивания.
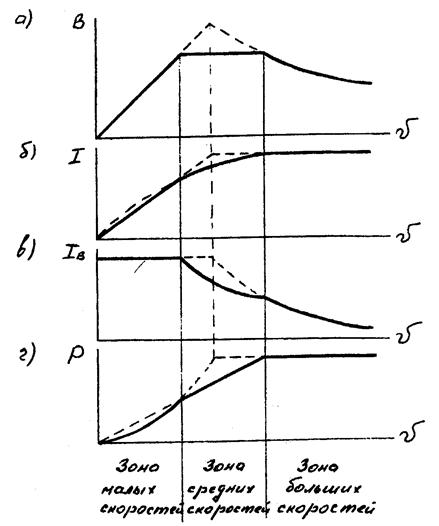
Учитывая, что мощность реостатного торможения
Р = В×V,
можно отметить, что в зоне средних скоростей мощность прямо пропорциональна скорости, а в зоне низких скоростей имеет квадратичную зависимость от скорости.
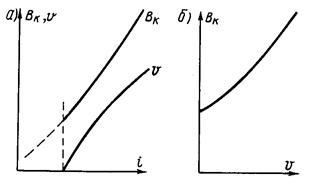
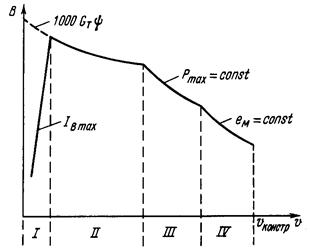 Для высокоскоростного
подвижного состава следует учитывать ограничение по максимальной ЭДС (по
коммутации). В этом случае желаемый закон регулирования тормозной силы будет
выглядеть как показано на рисунке. Поддерживать в зоне средних скоростей
тормозную силу, близкую к силе сцепления следует для систем, стремящихся
самоликвидировать юз (индивидуальное включение якорей ТД на тормозной резистор
или надежная противоюзовая защита). В остальных случаях следует поддерживать
постоянство тормозной силы.
Для высокоскоростного
подвижного состава следует учитывать ограничение по максимальной ЭДС (по
коммутации). В этом случае желаемый закон регулирования тормозной силы будет
выглядеть как показано на рисунке. Поддерживать в зоне средних скоростей
тормозную силу, близкую к силе сцепления следует для систем, стремящихся
самоликвидировать юз (индивидуальное включение якорей ТД на тормозной резистор
или надежная противоюзовая защита). В остальных случаях следует поддерживать
постоянство тормозной силы.
Все указанные выше законы регулирования возможно осуществить только с помощью системы автоматического регулирования тормозной силы. Подобные системы имеются на электровозах серии ЧС, ВЛ80С, электропоезда семейства ЭТ2.
К недостаткам реостатного торможения с независимым возбуждением следует отнести потребление электроэнергии в режиме торможения, усложнение схемы силовых цепей и невозможность параллельного включения ТД за счет сильного разброса характеристик (поэтому рекомендуется включать каждый ТД на персональный резистор). Кроме этого система не может обеспечить торможение до остановки, так как тормозной ток пропорционален скорости и при малых скоростях торможение становится неэффективным.
Достоинство указанной системы реостатного торможения является возможность автоматизировать процесс регулирования тормозной силой за счет изменения тока возбуждения во всем диапазоне скоростей.
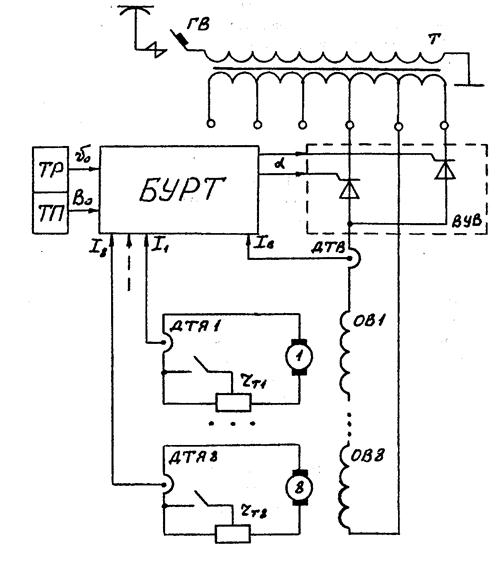 Рассмотрим
примеры схем реостатного торможения с независимым возбуждением, применяемые на
ЭПС. Электровоз ВЛ80С имеет реостатный тормоз с питанием обмоток возбуждения от
тягового трансформатора через управляемый выпрямитель. Система автоматического
регулирования тормозной силы обеспечивает указанные выше законы регулирования.
При скоростях 30-35 км/ч производится ступенчатое уменьшение величины
тормозного резистора для расширения зоны эффективности реостатного тормоза.
Обмотки возбуждения соединены последовательно для выравнивания нагрузок ТД,
якоря имеют индивидуальные тормозные резисторы, следовательно система мало
чувствительна к юзу.
Рассмотрим
примеры схем реостатного торможения с независимым возбуждением, применяемые на
ЭПС. Электровоз ВЛ80С имеет реостатный тормоз с питанием обмоток возбуждения от
тягового трансформатора через управляемый выпрямитель. Система автоматического
регулирования тормозной силы обеспечивает указанные выше законы регулирования.
При скоростях 30-35 км/ч производится ступенчатое уменьшение величины
тормозного резистора для расширения зоны эффективности реостатного тормоза.
Обмотки возбуждения соединены последовательно для выравнивания нагрузок ТД,
якоря имеют индивидуальные тормозные резисторы, следовательно система мало
чувствительна к юзу.
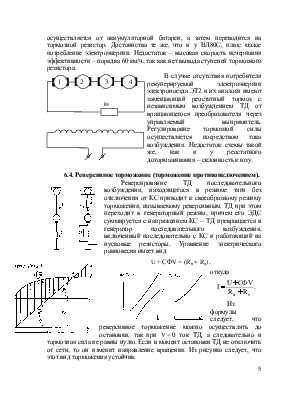
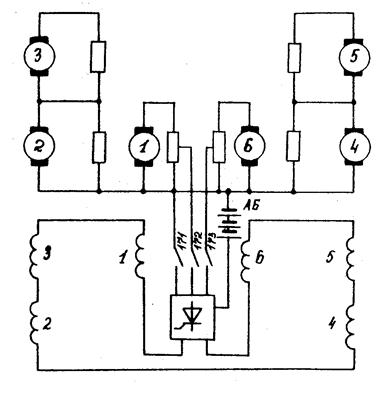
На пассажирских электровозах ЧС2Т, ЧС6, ЧС200 применяется реостатное торможение с возбуждением ТД от ступени тормозного резистора. Первоначальное возбуждение осуществляется от аккумуляторной батареи, а затем переводится на тормозной резистор. Достоинства те же, что и у ВЛ80С, плюс малое потребление электроэнергии. Недостаток – высокая скорость исчерпания эффективности – порядка 60 км/ч, так как нет вывода ступеней тормозного резистора.
 В случае отсутствия
потребителя рекуперируемой электроэнергии электропоезда ЭТ2 и их аналоги имеют
замещающий реостатный тормоз с независимым возбуждением ТД от вращающегося
преобразователя через управляемый выпрямитель. Регулирование тормозной силы
осуществляется посредством тока возбуждения. Недостаток схемы такой же, как и у
реостатного дотормаживания – склонность к юзу.
В случае отсутствия
потребителя рекуперируемой электроэнергии электропоезда ЭТ2 и их аналоги имеют
замещающий реостатный тормоз с независимым возбуждением ТД от вращающегося
преобразователя через управляемый выпрямитель. Регулирование тормозной силы
осуществляется посредством тока возбуждения. Недостаток схемы такой же, как и у
реостатного дотормаживания – склонность к юзу.
6.4. Реверсивное торможение (торможение противовключением).
 Реверсирование ТД
последовательного возбуждения, находящегося в режиме тяги без отключения от КС
приводит к своеобразному режиму торможения, называемому реверсивным. ТД при
этом переходит в генераторный режим, причем его ЭДС суммируется с напряжением
КС – ТД превращается в генератор последовательного возбуждения, включенный
последовательно с КС и работающий на пусковые резисторы. Уравнение
электрического равновесия имеет вид
Реверсирование ТД
последовательного возбуждения, находящегося в режиме тяги без отключения от КС
приводит к своеобразному режиму торможения, называемому реверсивным. ТД при
этом переходит в генераторный режим, причем его ЭДС суммируется с напряжением
КС – ТД превращается в генератор последовательного возбуждения, включенный
последовательно с КС и работающий на пусковые резисторы. Уравнение
электрического равновесия имеет вид
 U + СФV = (Rп
+ Rд),
U + СФV = (Rп
+ Rд),
 откуда
откуда
 .
.
Из формулы следует, что реверсивное торможение можно осуществлять до остановки, так при V = 0 ток ТД, а следовательно и тормозная сила не равны нулю. Если в момент остановки ТД не отключить от сети, то он изменит направление вращения. Из рисунка следует, что этот вид торможения устойчив.
Из той же формулы для тока ТД следует, что реверсивное торможение осуществимо без опасности повредить ТД только на низких скоростях.
Реверсивное торможение предусмотрено только на электровозах ВЛ85, ВЛ65. Здесь роль пусковых резисторов играет тяговый трансформатор и переход в этому торможению происходит без дополнительных переключений в силовой цепи из режима рекуперации. На остальных типах ЭПС реверсивное торможение следует рассматривать как аварийное при скоростях не более 25 км/ч.
Достоинством этого вида торможения является возможность тормозить до остановки.
Недостатками – возможность применения только на малых скоростях с опасностью повреждения ТД и значительное потребление электроэнергии из КС.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.