Если ток якорей превысит уровень уставки, то сигнал рассогласования U∆, а также сигнал управления Uу будут увеличиваться и, соответственно будут возрастать углы фазового регулирования УВ αр.Токи возбуждения и якорей в этом случае будут уменьшаться.
Так как выходное напряжение датчика тока Uдт суммируются с напряжением задатчика уставок Uзу, то при увеличении напряжения задатчика Uзу уставка тока якоря будет снижаться и наоборот.
В САУ имеется также канал поддержания тока возбуждения iв при отрывах токоприёмника.Этот канал включается в работу бескотактным релейным элементом при существенном снижении тока якорей вследствие нарушения скользящего контакта токоприёмника.
2.2. Функциональная схема САУ.
Функциональная схема САУ для контура регулирования тока якорей ТЭД электропоезда ЭТ 2 в режиме рекуперативного торможения показана на рис. 2.
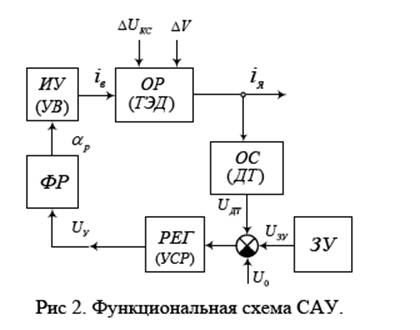
Объектом регулирования (ОР) являются тяговые двигатели независимого возбуждения. Выходной переменной объекта является ток якорей ТЭД iя.
Исполнительным устройством (ИУ) служит управляемый трёхфазный выпрямитель УВ, питаемый от трансформатора возбуждения ТрВ. Исполнительное устройство осуществляет регулирующее воздействие на объект регулирования ОР посредством выходного напряжения Uв и тока возбуждения iв.
Задающим элементом (ЗЭ) служат резисторные цепи задатчика уставок ЗУ, переключаемые контроллером машиниста в тормозных положениях. Задающим сигналом служит выходное напряжение задатчика уставок Uзу.
Возмущающее воздействие на объект регулирования передаётся в виде изменения напряжения контактной сети ∆Uкс, а также скорости движения ∆V.
Обратная связь (ОС) по току якорей ТЭД обеспечивается датчиком тока ДТ. Сигналом обратной связи является выходное напряжение датчика тока якоря Uдт.
Регулятор тока якорей ТЭД (Рег) состоит из усилителя сигнала рассогласования тока якорей УСР и усилителя тока УТ, которые формируют сигнал управления Uу с пропорциональным законом регулирования.
Фазорегулятор преобразует напряжение управления регулятора Uу в фазовые интервалы α1-α6, пропорциональные уровню напряжения Uу. Выходные сигналы фазорегулятора в форме пакетов импульсов управления тиристорными плечами УВ формируются выходным усилителем ВУ.
3. Статические и динамические характеристики элементов САУ.
3.1. Характеристики исполнительного устройства.
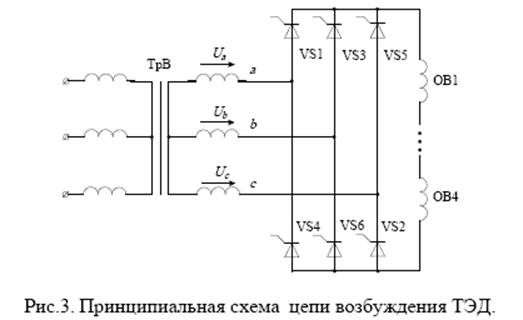
Исполнительное устройство состоит из трёхфазного тиристорного моста VS1-VS6 с симметричным управлением, питаемого от трёхфазного трансформатора возбуждения (ТрВ) (рис.3)
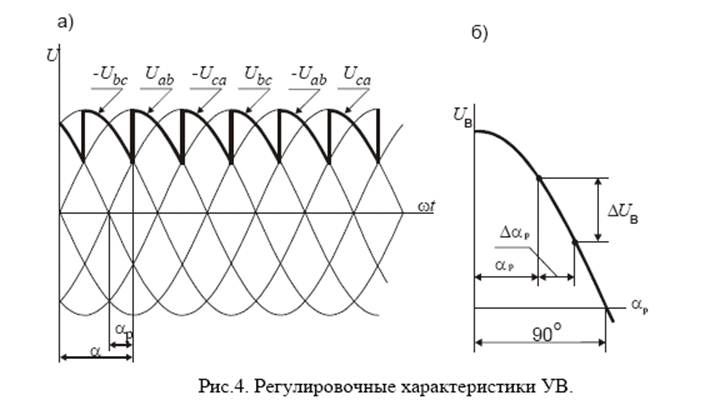
Тиристоры управляемого моста отпираются последовательно в порядке увеличения их номеров со сдвигом 60 эл. Градусов (рис.4).К тиристорам УВ прикладывается линейные напряжения трансформатора возбуждения Uab,Udc,Uca.
Фазные напряжения синхронизации Ua,Ub,Uc отстают относительно линейных напряжений, подводимых к УВ, на фазовый угол 30о . Поэтому выходные сигналы фазорегулятора также имеют постоянный сдвиг на фазовый угол 30о относительно линейных напряжений, подводимых к УВ.
Наименьший фазовый угол отпирания тиристорных плеч трёхфазного моста от начала фазы линейных напряжений составляет αmin-60о .Этот угол следует считать начальным углом регулирования УВ.С учётом фазового сдвига напряжений синхронизации относительно линейных напряжений трансформатора возбуждения угол фазового регулирования УВ определяется следующим выражением:
αр=α-(αmin-30о)=α-30о (1)
Зависимость выпрямленного напряжения цепи возбуждения ТЭД от угла фазового регулирования УВ определяется следующей формулой:
Uв(αр)=1,35*Uтв*сosαр-Rэiв-∆Uув (2)
Здесь Uтв- линейное напряжение трансформатора возбуждения, подводимое к УВ,
1,35- коэффициент выпрямления трёхфазной мостовой схемы,
Rэ- эквивалентное сопротивление управляемого выпрямителя, обусловленное потерей напряжения при кммутации тиристоров УВ,
∆Uув- потеря напряжения в тиристорах УВ.
Характеристику uв (αр) можно представить двумя составляющими:
- регулировочной uв0(αр)=1,35*Uтв*cosαр,
- внешней (нагрузочной) (uв0-Rэiв).
Регулировочная характеристика управляемого выпрямителя имеет две области: положительную и отрицательную (рис.4б). В установившихся режимах работы реализуется только положительная область характеристики, В переходных режимах изменения тока возбуждения возможно использование также отрицательной области, ускоряющей процесс снижения тока возбуждения.
Нелинейную зависимость регулировочной характеристики uв0 (αр) надо линеаризовать, заменив её линейным отрезком на ограниченном интервале изменения угла регулирования αр. В этом случае линеаризованную характеристику УВ можно выразить следующей формулой:
![]() (3)
(3)
Коэффициент наклона отрезка линеаризации характеристики представляет собой коэффициент усиления УВ по углу фазового регулирования ∆αр(рис.4б):
Оперативное линеаризированое уравнение динамической характеристики управляемого выпрямителя содержит два усилительных безынерционных звена:
∆Uв(р)=Кув∆αр-Rэ∆Iв(р).
(4)
3.2. Характеристики объекта регулирования.
Объект регулирования - тяговые электродвигатели имеют две индуктивно связанные электрические цепи якорей и возбуждения. Воздействия изменения уровня напряжения контактной сети ∆Uкс и скорости движения ∆V передаются в цепь якорей на выходную переменную - ток якорей iя. По цепи возбуждения передаётся регулирующее воздействие тока возбуждения iв. Индуктивная связь цепей возбуждения и якорей осуществляется посредством магнитного потока Ф, преобразуемого в э.д.с. вращения Е=4СVФV.
Динамические характеристики объекта регулирования определяются дифференциальными уравнениями равновесия токов и напряжений в цепях и возбуждения, а также уравнением намагничивающих сил с учётом действия вихревых токов в магнитопроводе ТЭД:
 (6)
(6)
 (7)
(7)
 (8)
(8)
Где:
Σrя,ΣLя – суммарные величины сопротивления и индуктивности цепи якорей,
rв,Lв – сопротивление и индуктивность обмоток возбуждения ТЭД,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.