Модуль «Fcn» формирует характеристику намагничивания ТЭД, которая воспроизводится функцией арктангенса [5]:
 .
(57)
.
(57)
Здесь: Iвн, СФн - номинальные величины тока возбуждения и магнитного потока ТЭД.
Модуль «Transfer» - вводит в функцию магнитного потока CF инерционность, обусловленную действием вихревых токов в остове тягового двигателя в виде передаточной функции апериодического звена первого порядка(см. уравнение (3)):
 . (58)
. (58)
В выражении (57) постоянная времени τвх приведенного форсирующего звена рассчитывается по формуле (18) для заданного тока ТЭД, переменная sобозначает множитель операторного преобразования (Лаплас).
Модуль «Transfer1» осуществляет операцию дифференцирования магнитного потока CF с постоянной времени, определяемой числом витков w , для формирования ЭДС самоиндукции обмоток возбуждения. Модуль содержит дополнительно передаточную функцию апериодического звена первого порядка с постоянной времени τА,=0.001с, осуществляющего сглаживание на выходе дифференцирующего звена помех ступенчатого вида:
 . (59)
. (59)
Модуль «subsystem1» формирует ЭДС вращения тягового электродвигателя посредством перемножения магнитного потока CF на скорость движения v.
Модули «Transport delay1» и «Transport delay2» осуществляют задержку в передаче сигналов на 10-6 сек для разделения алгебраических контуров, появляющихся в ходе решения систем дифференциальных уравнений в пакете Simulink.
Модули «E_fcem» и «E_sam» вводят в контуры тока якорей и тока возбуждения э.д.с. вращения и э.д.с. самоиндукции. Модули позволяют связать электрические элементы пакета «Power System Blockset» со структурными или функциональными схемами элементов библиотек «Simulink Library».
Уравнение равновесия сил на ободе колесной пары (9) воспроизводят модули «Prodact1», «Constant1», «Fcn2».
Модуль «Prodact1» формирует силу тяги на ободе колесной пары Fе посредством перемножения сигналов тока якоря ia и магнитного потока СF, кН:
![]() .
(60)
.
(60)
Модули «Constant1», «Fcn2» формируют постоянную Tcon и переменную Tvar составляющие сил сопротивления на ободе колесной пары, обусловленные силами сопротивления движению W0(v) поезда, кН:
![]() . (61)
. (61)
 (62)
(62)
 . (63)
. (63)
Модуль «Sum» осуществляет суммирование силы тяги Tе и составляющих сил сопротивления движению Tcon; Tvar.
Модуль «Subsystem» передает суммарный момент на интегратор в случае положительности суммы моментов или положительности скорости движения электропоезда;
Модуль «Gain1» формирует производную угловой скорости, выполняя деление выходного сигнала суммарного момента блока «Subsystem» на массу поезда, приведенную к одному тяговому электродвигателю, т:
 . (64)
. (64)
Модуль «Integrator» интегрирует выходной сигнал модуля «Gain1», формируя на выходе угловую скорость ω вращения якоря ТЭД. Масштабирование сигнала при переводе угловой скорости вращения якоря ТЭД в линейную скорость движения выполняет модуль «Gain3» .
Модули «Ideal Switch», «Ideal Switch2» производят переключение ступеней ослабления возбуждения по команде входа «In3».
Выходы 1, 2, 3 компьютерной модели предназначены для измерения тока якоря, тока возбуждения и скорости движения электропоезда.
6.1.4.Компьютерная модель элементов обратной связи
Выходные цепи датчиков тока снабжены сглаживающими фильтрами для защиты МПСУ от импульсных помех. Поэтому формирование выходных сигналов датчиков тока производится посредством умножения сигнала тока ТЭД на апериодическое 1-го порядка с постоянной времени τдт выходных сглаживающих фильтров:
 .
.
Блок датчиков тока производит цифровую обработку сигналов тока якорей, аналогично производимой в МПСУ, для формирования среднего за период управления значения. Цифровая обработка производится посредством 100-кратного квантования сигналов модулей «Ia», «If» блока ТЭД каждый ν-й период управления, равный 0.01с (полупериод изменения питающего напряжения).Диаграмма цифровой обработки сигналов датчиков тока показана на рис.5.
Все
значения, полученные на каждый период управления, формируются в вектор
размерностью ![]() {1*100}, после чего вычисляется
среднее значение элементов вектора, например, для тока якорей модели ia:
{1*100}, после чего вычисляется
среднее значение элементов вектора, например, для тока якорей модели ia:
 . (65)
. (65)
Далее полученные значения среднего за период управления сигнала датчиков токов передаются в регулятор РТЯ.
6.1.5. Компьютерная модель регулятора РТЯ
Дискретное уравнение (28)
пропорционально-интегрального закона регулирования воспроизводятся модулями
пропорциональной и интегральной обработки сигнала рассогласования (Iуст-![]() ) .Функциональная схема блока ПИ-регулятора тока
якоря ТЭД компьютерной модели показана на рис. 13,а.
) .Функциональная схема блока ПИ-регулятора тока
якоря ТЭД компьютерной модели показана на рис. 13,а.
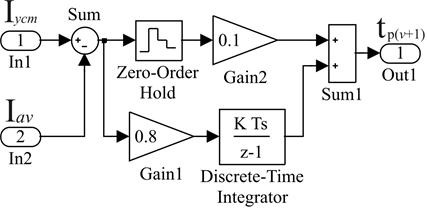
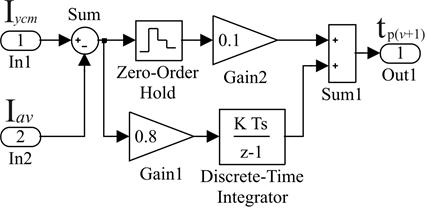
Рис.13. Функциональные схемы модулей регуляторов РТЯ.
Дискретное уравнение (32) вычисления выходного сигнала
ПД-регулятора для (v+1) периода цикла управления МПСУ воспроизводятся
модулями пропорциональной и дифференциальной обработки сигнала рассогласования
Iуст-![]() ). Функциональная схема блока ПД-регулятора тока
якоря ТЭД компьютерной модели показана на рис. 13,б.
). Функциональная схема блока ПД-регулятора тока
якоря ТЭД компьютерной модели показана на рис. 13,б.
На схемах рис. 8 на
вход «In1» подается сигнал уставки тока Iуст, на вход «In2»
средний за v-й период управления сигнал тока якоря ![]()
![]() . На входе пропорционального канала включен
квантователь нулевого порядка. В блоках интегрирования или дифференцирования
квантование сигналов производится в процессе математической обработки.
. На входе пропорционального канала включен
квантователь нулевого порядка. В блоках интегрирования или дифференцирования
квантование сигналов производится в процессе математической обработки.
Коэффициенты усиления регуляторов являются параметрами настройки и выбираются с учетом параметров силовых цепей и режимов работы электропоезда [3, 6]. Числовые величины коэффициентов модели вводятся в модули «Gain» пропорционального, интегрального или дифференциального каналов регуляторов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.