Выбор постоянной времени регулятора производят на основании рассчитанной ранее приведенной постоянной времени Tпр эквивалентного колебательного звена 2-го порядка цепи ТЭД и постоянной времени датчика тока Tдт. Постоянную времени Tир интегрирующего канала ПИ-регулятора следует принять в интервале (Tпр>Tир>2Tдт). При Tир=Tпр следует ожидать апериодический процесс, при Tир=2Tдт следует ожидать мало-колебательный процесс регулирования. Постоянную времени Tдр дифференцирующего канала ПД-регулятора при ωср>(1/Tдт) следует принять в интервале (Tпр>Tр>Tдт). При Tдр=2Tдт следует ожидать апериодический процесс, при Tдр=Tдт следует ожидать мало-колебательный процесс регулирования. При ωср<(1/Tдт) Постоянную времени Tдр дифференцирующего канала ПД-регулятора следует принять в интервале (Tпр>Tдр>2/ωср). При Tдр=4/ωср следует ожидать апериодический процесс, при Tдр=2/ωср следует ожидать мало-колебательный процесс регулирования. Постоянную времени апериодического звена сглаживающего фильтра ПД-регулятора надо принять в пределах Tдф=(0,2-0,3)Tр.
Принятое соотношение динамических параметров САУ и регулятора обеспечивает настройку регуляторов, близкую к оптимальной .
В выполняемом разделе надо привести подробный параметров элементов силовой цепи, расчет коэффициентов усиления и постоянных времени всех звеньев, общего коэффициента усиления САУ, коэффициента усиления регулятора.
Результаты расчетов надо записать в соответствующие строки табл.4.
Контрольные вопросы к разд.5
1.Как выбрать динамические параметры регулятора проектируемой САУ?
2.Как выбрать частоту среза ЛАЧХ проектируемой САУ?
3. Как рассчитать и выбрать общий коэффициент усиления системы проектируемой САУ?
4.Как рассчитать параметры настройки регулятора проектируемой САУ?
6.Расчет переходных процессов с использованием компьютерных моделей САУ тока ТЭД
Компьютерная модель САУ тяговыми электродвигателями электровоза переменного тока с зонно-фазовым регулированием напряжения предназначена для расчета переходных процессов изменения тока и напряжения тяговых электродвигателей при разгоне электровоза и при ступенчатом изменении напряжения контактной сети при работе электровоза на четвертой зоне регулирования.
6.1. Компьютерная модель САУ на основе
физических элементов
Компьютерная модель САУ режимов тяги электровоза с зонно-фазовым регулированием на основе физических элементов создана в среде «MatLab» с приложением «Simulink» [2]. Функциональная схема САУ контура регулирования тока ТЭД показана на рис.9. Модель содержит блоки источника питания, тягового трансформатора, выпрямительно-инверторного преобразователя, тягового электродвигателя, датчика тока ТЭД, регулятора тока тяговых электродвигателей, системы фазового управления ВИП.
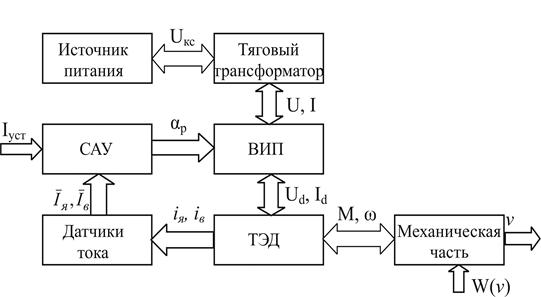
Рис.9.Функциональная схема САУ контура регулирования тока ТЭД.
6.1.1.Компьютерная модель тягового трансформатора
Компьютерная модель тягового трансформатора содержит упрощенную модель тяговой сети в виде источника синусоидального напряжения неограниченной мощности, питающего сетевую обмотку тягового трансформатора:
![]()
Индуктивность и сопротивление тяговой сети учитываются введением распределенных параметров Lкс ,Rкс.
Компьютерная модель тягового трансформатора выполнена на основе схемотехнического модуля Simulink «Multi-winding transformer». Расчетная схема трансформатора представлена на рис.10.
Рис.10.Расчетная схема тягового трансформатора.
Вводимыми параметрами модуля трансформатора являются:
-номинальная мощность трансформатора, (ВА) и номинальная частота напряжения сети, (Гц) [Pн(VA), fн(Hz)].
-действующие значения напряжений обмоток трансформатора, [U11, U21, U22, U23], (В).
Активное сопротивление и индуктивность рассеяния обмоток трансформатора [R11, R21, R22, R23, L11, L21, L22, L23],Ом, Гн.
Активное сопротивление и индуктивность цепи намагничивания трансформатора [Rm, Lm],Ом, Гн.
Параметры цепи намагничивания определяются величиной тока намагничивания, принятого равным 1% от номинального тока сетевой обмотки трансформатора.
6.1.2.Компьютерная модель ВИП
Блок ВИП составлен из 8-ми модулей «Thyristor», шунтированных снабберными RC-цепями. Схема компьютерной модели ВИП показана на рис.11. Отпирание тиристорных модулей осуществляется посредством подачи единичных импульсных сигналов длительностью 10 мкс, формируемых таймерами блока фазового регулирования. Коммутация тиристоров компьютерной модели естественная, без обратных токов.
Алгоритмы работы компьютерной модели ВИП идентичны алгоритмам, применяемым на электровозах серий 2ЭС5К, ЭП1.
Рис.11 Схема компьютерной модели ВИП.
6.1.3.Компьютерная модель тягового электродвигателя
Компьютерная модель тягового двигателя постоянного тока последовательного возбуждения представлена на рис.12. Модель составлена на основе дифференциальных уравнений равновесия напряжений и э.д.с. в цепи якорей тяговых электродвигателей (4), намагничивющих сил с учетом действия вихревых токов (5), вращающих моментов на валу ТЭД (6) [3].
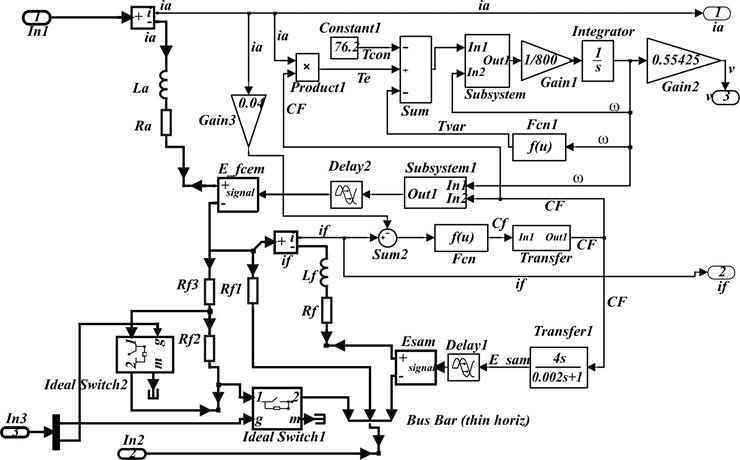
Рис.12. Компьютерная модель тягового двигателя постоянного тока
В компьютерной модели параметры силовой цепи ТЭД представлены сопротивлением Ra и индуктивностью рассеяния La обмоток якоря, сопротивлением Rf и индуктивностью рассеяния Lf обмоток возбуждения. В цепь возбуждения ТЭД компьютерной модели включены сопротивления постоянного шунтирования Rf0 обмоток возбуждения, и сопротивления ступеней ослабления возбуждения Rf1, Rf2.
Напряжение питания ТЭД ud подводится через входы In1, In2 от блока ВИП.
Ниже перечислены функциональные модули, посредством которых производят суммирование и преобразование сигналов компьютерной модели ТЭД.
Модули «Ia», «If» - формируют сигналы тока якоря и тока возбуждения.
Модули «Gain3» и «Sum1» воспроизводят учет размагничивающей реакции якоря. Ток якоря умножается в модуле «Gain3» на коэффициент размагничивающего действия φ и вычитается в модуле «Sum1» из тока возбуждения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.