


Балтийский Государственный Технический Университет
«ВОЕНМЕХ» им. Д.Ф.Устинова
Лабораторная работа №1
Структурный и кинематический анализ плоского рычажного механизма
(установка № 3-15)
Выполнил: Гайдай А.И.
Группа: М151
Преподаватель: Лавров В.Ю.
Санкт-Петербург
2007г.
Цель работы: Изучить строение механизма, сделать его структурный анализ. Получить зависимость перемещения выходного звена от характера движения входного, используя для аппроксимации разложение функции в ряд Фурье.
1. Структурный анализ механизма
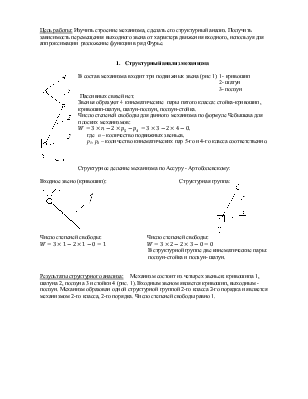
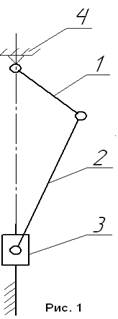 В состав механизма входит три подвижных
звена (рис 1): 1- кривошип
В состав механизма входит три подвижных
звена (рис 1): 1- кривошип
2- шатун
3- ползун
Пассивных связей нет.
Звенья образуют 4 кинематические пары пятого класса: стойка-кривошип, кривошип-шатун, шатун-ползун, ползун-стойка.
Число степеней свободы для данного механизма по формуле Чебышева для плоских механизмов:
![]() , гдеn – количество подвижных звеньев,
, гдеn – количество подвижных звеньев,
p5, p4 – количество кинематических пар 5-го и 4-го класса соответственно.
Структурное деление механизма по Ассуру - Артоболевскому:
Входное звено (кривошип): Структурная группа:
Число степеней свободы: Число степеней свободы:
![]()
![]()
В структурной группе две кинематические пары:
ползун-стойка и ползун- шатун.
Результаты структурного анализа: Механизм состоит из четырех звеньев: кривошипа 1, шатуна 2, ползуна 3 и стойки 4 (рис. 1). Входным звеном является кривошип, выходным - ползун. Механизм образован одной структурной группой 2-го класса 2-го порядка и является механизмом 2-го класса, 2-го порядка. Число степеней свободы равно 1.
2. Кинематический анализ механизма.
Функция зависимости перемещения ползуна от угла поворота кривошипа S(φ) с шагом Δφ=20°:
|
φ |
0 |
20 |
40 |
60 |
80 |
100 |
120 |
140 |
160 |
180 |
200 |
220 |
240 |
260 |
280 |
300 |
320 |
340 |
360 |
|
Х |
190 |
196 |
210 |
223 |
237 |
250 |
261 |
267 |
269 |
270 |
266 |
259 |
250 |
238 |
226 |
212 |
200 |
192 |
190 |
|
S |
0 |
6 |
20 |
33 |
47 |
60 |
71 |
77 |
79 |
80 |
76 |
69 |
60 |
48 |
36 |
22 |
10 |
2 |
0 |
Перейдем от функции S(φ) к функции S(t):
Δφ=ωΔt Δt= Δφ /ω ω = сonst = 50 [рад/с]
Формула для расчета шага ![]()
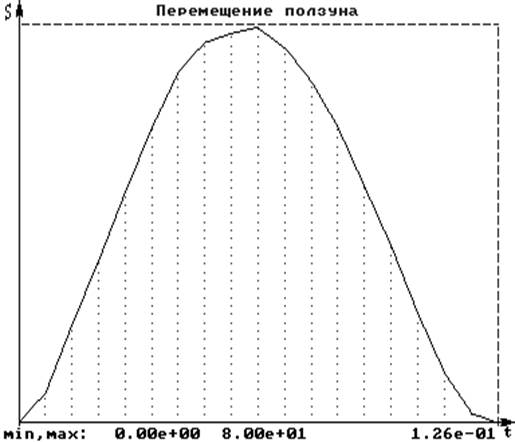
Функция зависимости перемещения ползуна от времени S(t):
n t S(t)
0. 0.000e+000 0.000e+000
 1. 7.000e-003 6.000e+000
1. 7.000e-003 6.000e+000
2. 1.400e-002 2.000e+001
3. 2.100e-002 3.300e+001
4. 2.800e-002 4.700e+001
5. 3.500e-002 6.000e+001
6. 4.200e-002 7.100e+001
7. 4.900e-002 7.700e+001
8. 5.600e-002 7.900e+001
9. 6.300e-002 8.000e+001
10. 7.000e-002 7.600e+001
11. 7.700e-002 6.900e+001
12. 8.400e-002 6.000e+001
13. 9.100e-002 4.800e+001
14. 9.800e-002 3.600e+001
15. 1.050e-001 2.200e+001
16. 1.120e-001 1.000e+001
17. 1.190e-001 2.000e+000
18. 1.260e-001 0.000e+000
Разложим функцию S(t) в ряд Фурье, т.е. заменим ее тригонометрическим полиномом вида:
![]() , где Т= 2π / ω =2х3.14/50=0.1256 [c]
– время одного полного оборота кривошипа ;
, где Т= 2π / ω =2х3.14/50=0.1256 [c]
– время одного полного оборота кривошипа ;
![]() - амплитуда
сигнала на j-й частоте
- амплитуда
сигнала на j-й частоте
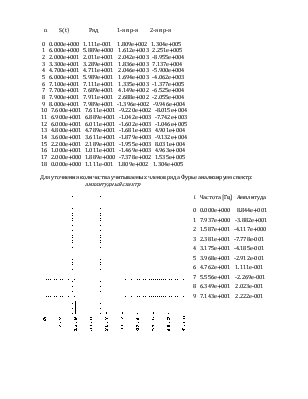
Частота сигнала для j-й гармоники ![]()
Так как Функция S(t) задана таблицей значений в конечном числе точек m, то максимальное число членов ряда nmax= m/2 = 9.
Коэффициенты ряда Фурье для функции заданной в m точках вычисляются по следующим формулам:
![]()
![]() ,
,
где Si – значения функции S(t), i=0,1,2…m-1.
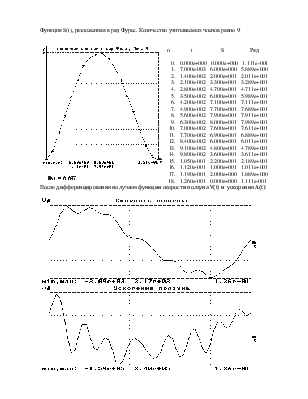
Функция S(t), разложенная в ряд Фурье. Количество учитываемых членов равно 9:
 n t S Ряд
n t S Ряд
0. 0.000e+000 0.000e+000 1.111e-001
1. 7.000e-003 6.000e+000 5.889e+000
2. 1.400e-002 2.000e+001 2.011e+001
3. 2.100e-002 3.300e+001 3.289e+001
4. 2.800e-002 4.700e+001 4.711e+001
5. 3.500e-002 6.000e+001 5.989e+001
6. 4.200e-002 7.100e+001 7.111e+001
7. 4.900e-002 7.700e+001 7.689e+001
8. 5.600e-002 7.900e+001 7.911e+001
9. 6.300e-002 8.000e+001 7.989e+001
10. 7.000e-002 7.600e+001 7.611e+001
11. 7.700e-002 6.900e+001 6.889e+001
12. 8.400e-002 6.000e+001 6.011e+001
13. 9.100e-002 4.800e+001 4.789e+001
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.