В большинстве систем синхронизации вхождение в синхронизм выполняется "по подтверждению": принимается решение о выделении синхроимпульсов в определенной фазе и после прихода единицы в этой фазе через следующих восемь символов система входит в синхронизм: выделяемые в этой фазе синхроимпульсы используются как внешние синхроимпульсы (рис.4, 10).
Из-за помех возможно пропадание внешних синхроимпульсов. При этом система может работать как с удержанием синхронизма, так и без удержания.
Удержание означает, что система синхронизации будет некоторое время (несколько слов, канальных интервалов ТК) поддерживать синхронизацию при пропадании внешних синхроимпульсов. Т.е. если после слова с нормальной синхронизацией принимается слово с отсутствующей синхронизацией, то делается предположение, что в данном слове имеется ошибка в символе синхронизации. Данное слово засчитывается как верно принятое. Поскольку в составе системы синхронизации имеется инерционный генератор (рис.4), пропадание внешних синхросигналов не приводит к одновременному исчезновению внутренних синхроимпульсов.
При переходе в режим удержания включается счетчик, который отслеживает количество подряд удержанных слов. После превышения счетчиком порога удержаний происходит срыв синхронизации и переход к поиску синхросигналов.
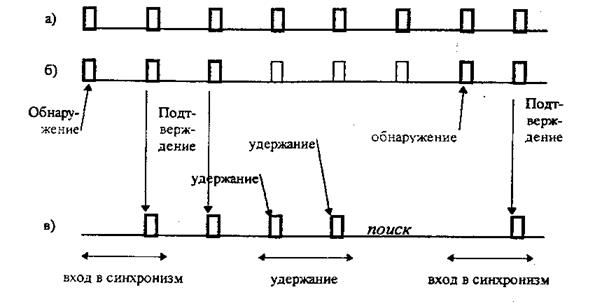
Рис.10. Синхронизация слов: а) синхроимпульсы слов без помех; б) синхроимпульсы слов, искаженные помехами; в) внутренние синхроимпульсы
Если после нескольких удержанных слов обнаруживается синхронизация, а порог удержаний еще не превышен, то происходит сброс счетчика удержаний.
Без удержания пропадание внешнего синхросигнала приводит к немедленному переходу системы синхронизации в режим поиска сигналов синхронизации.
В цифровых РСПИ маркер формируется в виде кодовой комбинации, занимающей один или несколько канальных интервалов ТК.
Оценим вероятности ложной синхронизации и пропуска маркера. Будем считать, что длина маркера равна целому числу канальных интервалов, комбинация символов маркера запрещена для информационных каналов, а двойными ошибками в кодовых комбинациях можно пренебречь.
Вероятность РЛ.М
ложной синхронизации определяется произведением вероятности появления
кодовой комбинации, содержащей то же число символов ![]() ,
что и маркер, и отличающейся от него одним символом, на вероятность искажения
этого символа. Если априорные вероятности появления символов "0" и
"1" в групповом сигнале РСПИ одинаковы Р(0) = Р(1) = 1/2, то
,
что и маркер, и отличающейся от него одним символом, на вероятность искажения
этого символа. Если априорные вероятности появления символов "0" и
"1" в групповом сигнале РСПИ одинаковы Р(0) = Р(1) = 1/2, то
![]() , (7)
, (7)
где р - вероятность ошибочного приема одного символа. Данная формула справедлива в случае поиска маркера с привлечением синхроимпульсов слов (каналов) (см. рис.3,в), т.е. с шагом поиска в одно слово.
Если маркер занимает несколько канальных интервалов, то технически трудно осуществить запрет кодовой комбинации в информационных каналах, соответствующей маркеру. Однако, чем больше канальных интервалов занимает маркер, тем меньше вероятность появления такой кодовой комбинации. В этом случае вероятность появления ложного маркера равна
![]() , (8)
, (8)
т.е. вероятность РЛ.М практически зависит только от вероятности появления определяемой длиной маркера комбинации информационных символов такой же структуры, как и маркер. Такая же вероятность появления ложного маркера имеет место в случае поиска маркера без использования синхроимпульсов слов (каналов), т.е. с шагом поиска в один символ, когда ложные маркеры образуются на стыках каналов и не могут быть запрещены.
Вероятность РПР.М пропуска маркера определяется вероятностью того, что в маркере будет искажен хотя бы один символ
![]() . (9)
. (9)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.