













![]()
УТВЕРЖДАЮ
Директор ЦНИИ «Электроприбор»
академик РАН
___________________В.Г.Пешехонов
"_____"__________________2005 г.
Исследование азимутального гироскопа направления (гироагрегат ГА-6)
Методические указания по выполнению лабораторной работы №1
Авторы: Л.А. Северов, В.К. Пономарев
Санкт-Петербург
2006
Цель работы: ознакомление с принципом действия, устройством и электрической схемой азимутального гироскопа направления (гироагрегатаГА-6), а также экспе-риментальное исследование основных инструментальных погрешностей и методических ошибок прибора при работе в составе авиационной курсовой системы ГМК-1.
Азимутальные гироскопы направления относятся к группе курсовых гироскопов и используются для измерения отклонений летательного аппарата по курсу относительно опорной системы координат. В авиации гироскопы направления применяются в качестве автономного измерителя или входят в состав курсовых авиационных систем, где работают совместно с другими датчиками курса. В первом случае их называют гирополукомпасами, во втором – именуют гироагрегатами.
Принципы
действия азимутальных гироскопов направления основаны на свойствах гироскопа с
тремя степенями свободы сохранять положение оси вращения ротора неизменным в
пространстве, а так же прецессировать под воздействием управляющих моментов
относительно внутренней и наружной осей подвеса. Ось подвеса наружной рамки в
гироскопах направления ориентируют по вертикальной оси летательного аппарата,
при этом главная ось гироскопа с помощью специальных систем удерживается либо в
плоскости горизонта (горизонтальная коррекция), либо перпендикулярно оси
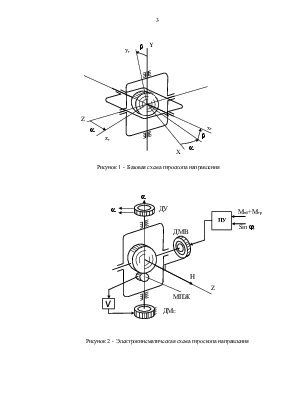
подвеса наружной рамки (межрамочная коррекция). Ориентация главной оси вращения
ротора в координатах корпуса определяется углом поворота наружной рамки ![]() и углом поворота внутренней рамки
относительно наружной
и углом поворота внутренней рамки
относительно наружной ![]() . Базовая схема гироскопа
направления и система отсчета углов показаны на рисунке 1.
. Базовая схема гироскопа
направления и система отсчета углов показаны на рисунке 1.
Основные характеристики гироскопа направления можно выявить на основе уравнений прецессии гироскопа, которые при учете введенных углов ориентации будут иметь вид [1]
![]() , (1)
, (1)
где ![]() -
кинетический момент гироскопа,
-
кинетический момент гироскопа, ![]() - проекции
угловой скорости вращения корпуса прибора на оси ротора без учета его вращения
(оси Резаля),
- проекции
угловой скорости вращения корпуса прибора на оси ротора без учета его вращения
(оси Резаля), ![]() и
и ![]() -
моменты внешних сил, действующих вокруг осей карданова подвеса.
-
моменты внешних сил, действующих вокруг осей карданова подвеса.
Принимая внимание
расположение прибора на борту летательного аппарата угловые скорости ![]() и
и ![]() можно
выразить через угловые скорости летательного аппарата в связанных осях
можно
выразить через угловые скорости летательного аппарата в связанных осях
 (2)
(2)
С другой стороны, вектор угловой скорости летательного аппарата является суммой вектора угловой скорости опорной системы координат (в связанных осях) и вектора вращения летательного аппарата относительно опорной системы координат
 |
|||||||
|
|||||||
 |
|||||||
|
|||||||
![]()
где ![]() -
матрица ориентации связанной с летательным аппаратом системы координат относительно
опорной системы.
-
матрица ориентации связанной с летательным аппаратом системы координат относительно
опорной системы.
Компоненты матрицы ![]() находятся по формулам
находятся по формулам
 (3)
(3)
где ![]() ,
,
![]() ,
, ![]() -
углы рысканья, тангажа и крена летательного аппарата.
-
углы рысканья, тангажа и крена летательного аппарата.
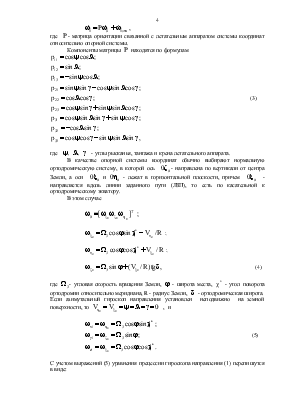
В качестве опорной
системы координат обычно выбирают нормальную ортодромическую систему, в которой
ось ![]() - направлена по вертикали от центра
Земли, а оси
- направлена по вертикали от центра
Земли, а оси ![]() и
и ![]() -
лежат в горизонтальной плоскости, причем
-
лежат в горизонтальной плоскости, причем ![]() -
направляется вдоль линии заданного пути (ЛЗП), то есть по касательной к
ортодромическому экватору.
-
направляется вдоль линии заданного пути (ЛЗП), то есть по касательной к
ортодромическому экватору.
В этом случае
![]()
![]() ;
;
![]() ;
;
![]() (4)
(4)
где ![]() -
угловая скорость вращения Земли,
-
угловая скорость вращения Земли, ![]() - широта места,
- широта места, ![]() - угол поворота ортодромии относительно
меридиана, R - радиус Земли,
- угол поворота ортодромии относительно
меридиана, R - радиус Земли, ![]() -
ортодромическая широта.
-
ортодромическая широта.
Если азимутальный гироскоп
направления установлен неподвижно на земной поверхности, то ![]() , и
, и
 (5)
(5)
С учетом выражений (5) уравнения прецессии гироскопа направления (1) перепишутся в виде:
![]()
![]()
Отсюда
 (6)
(6)
Как видно, под воздействием внешних возмущающих моментов и вращения Земли наблюдается непрерывное движение наружной и внутренней рамок гироскопа. При этом, если вращение наружной рамки не отражается на функциональных способностях прибора, то вращение внутренней рамки ведет к опасности потери его работоспособности в результате сложения рамок (лишения одной степени свободы).
Для исключения
возможности сложения рамок в гироскопах направления используют систему
горизонтальной или межрамочной коррекции. Наибольшее распространение на практике
получила система горизонтальной коррекции, которая реализуется путем установки
на внутренней рамке (гироузле) чувствительного к отклонению от плоскости
горизонта жидкостного маятникового переключателя и датчика момента размещенного
по наружной оси подвеса. При наличии отклонения главной оси гироскопа от
плоскости горизонта сигнал с маятникового переключателя подается на датчик
момента вызывая прецессию гироскопа относительно внутренней оси. В ходе
прецессии гироузел приходит в исходное положение, при котором ![]() и
и ![]() .
Если это условие выполняется точно, то движение наружной рамки относительно
корпуса будет описываться более простым уравнением
.
Если это условие выполняется точно, то движение наружной рамки относительно
корпуса будет описываться более простым уравнением
 .
.
Среди внешних
возмущающих моментов наибольшее влияние на уход гироскопа направления по
курсу оказывает остаточный момент несбалансированности ![]() и
момент трения по внутренней оси подвеса
и
момент трения по внутренней оси подвеса ![]() .
Для компенсации видимого ухода гироскопа и уходов инструментального характера в
гироскопах направления применяют систему азимутальной коррекции, работа
которой в одном из вариантов ее реализации основана на создании управляемой
прецессии гироскопа в точности равной его уходу под воздействием возмущающих
факторов. Управляемая прецессия создается с помощью датчика момента
размещенного по внутренней оси подвеса гироскопа, а требуемая величина
напряжения
.
Для компенсации видимого ухода гироскопа и уходов инструментального характера в
гироскопах направления применяют систему азимутальной коррекции, работа
которой в одном из вариантов ее реализации основана на создании управляемой
прецессии гироскопа в точности равной его уходу под воздействием возмущающих
факторов. Управляемая прецессия создается с помощью датчика момента
размещенного по внутренней оси подвеса гироскопа, а требуемая величина
напряжения ![]() , подаваемого на датчик момента, в
зависимости от широты места и суммарной величины момента несбалансированности и
момента трения, вырабатывается в пульте управления гирополукомпаса или
курсовой системы
, подаваемого на датчик момента, в
зависимости от широты места и суммарной величины момента несбалансированности и
момента трения, вырабатывается в пульте управления гирополукомпаса или
курсовой системы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.