











ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ
![]()
Кафедра “Электромеханические комплексы и системы”
Курсовая работа
по дисциплине “ОЭ ТУЛП”
“Выбор электродвигателей мостовых кранов предприятий железнодорожного транспорта”
Вариант № 14
![]()
Выполнил:
студент группы ЭТ-401
Кожевников Д. М.
Проверил:
асс. Харебов С. К.
Санкт-Петербург
2007
СОДЕРЖАНИЕ
ВВЕДЕНИЕ. 3
1. ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ. 4
2. РАСЧЕТ МЕХАНИЗМА ПОДЪЕМА ГРУЗА. 5
3. РАСЧЕТ ВЕЛИЧИНЫ ПУСКОВЫХ СОПРОТИВЛЕНИЙ ДЛЯ ДВИГАТЕЛЯ ПОДЪЕМА ГРУЗА. 13
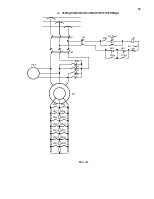
4. ПРИНЦИПИАЛЬНАЯ СХЕМА ЭЛЕКТРОПРИВОДА. 14
СПИСОК ЛИТЕРАТУРЫ.. 15
ВВЕДЕНИЕ
Электродвигатель (ЭД) является основным элементом электропривода производственных механизмов. Оптимальное соответствие его конструктивных и технических данных условиям работы механизма позволяет обеспечить минимальную стоимость электрооборудования, высокую надежность его работы и наименьшие потери электроэнергии в эксплуатации.
Выбор ЭД осуществляется обычно на стадии проектирования электрических приводов. Этот этап требует особого внимания, ибо от правильного выбора типа исполнения и мощности ЭД, кроме указанных факторов, непосредственно зависят управляемость электропривода, его регулировочные свойства и, в конечном счете, производительность механизма. Для решения этих вопросов требуются глубокие знания в области механики, электромеханики и теории автоматизированного электропривода.
Необходимость выбора ЭД часто возникает и в процессе эксплуатации. Инженерам-электромеханикам депо или других предприятий ж.-д. транспорта приходится решать эту задачу при планово-предупредительных ремонтах, в случае выхода ЭД из строя, а также при замене ЭД, параметры которого не соответствуют требованиям приводимого в движение механизма.
В содержание курсовой работы входят:
1) определение мощности и выбор типа ЭД механизма подъема груза;
2) расчет числа и величины ступеней пускорегулировочных сопротивлений;
3) составление принципиальной электрической схемы управления электропривода механизма подъема груза.
1. ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ
Общие данные крана:
грузоподъемность
крана: ![]() =20 т;
=20 т;
число
циклов в час: ![]() =12;
=12;
линейное
напряжение питающей трехфазной сети промышленной частоты: ![]() =380 В.
=380 В.
Механизм подъема груза:
масса
крюка (захватного устройства): ![]() =750 кг;
=750 кг;
средняя
скорость подъема: ![]() =0,55 м/с;
=0,55 м/с;
средняя
высота подъема: ![]() =7 м;
=7 м;
диаметр
барабана лебедки: ![]() =0,5 м;
=0,5 м;
КПД
лебедки при подъеме полного груза: ![]() =0,84.
=0,84.
2. РАСЧЕТ МЕХАНИЗМА ПОДЪЕМА ГРУЗА
2.1. Продолжительность цикла
 (с).
(с).
2.2. Приближенная величина мощности, необходимая для подъема полного груза
 (кВт).
(кВт).
2.3. Время работы двигателя подъема в течение одного цикла
 (с).
(с).
2.4. Относительная продолжительность включения двигателя
 %.
%.
Приводим значение мощности к
стандартному значению ![]() = 15%:
= 15%:
 (кВт).
(кВт).
Выбираем двигатель типа MTH 713-10 со следующими данными:
![]() =200
кВт при
=200
кВт при
![]() =15%;
=15%; ![]() =582 об/мин;
=582 об/мин; ![]() =458 А;
=458 А; ![]() =0,73;
=0,73; ![]() =90,5%;
=90,5%;
![]() =305 А;
=305 А; ![]() =408
В;
=408
В; ![]() =7310 Н·м;
=7310 Н·м; ![]() =15 кг·м2;
=15 кг·м2; ![]() =0,9 кг·м2;
=0,9 кг·м2; ![]() =1900 кг.
=1900 кг.
2.5. Моменты на валу двигателя:
- при подъеме полного груза
 (Н·м),
(Н·м),
где
 – передаточное число редуктора,
– передаточное число редуктора,
где ![]() –
номинальная частота вращения двигателя, об/мин, при принятой средней скорости
подъема груза, м/с;
–
номинальная частота вращения двигателя, об/мин, при принятой средней скорости
подъема груза, м/с;
![]() – радиус барабана
лебедки, м;
– радиус барабана
лебедки, м;
- при опускании полного груза
 (Н·м),
(Н·м),
где  ;
;
- при подъеме пустого захватного приспособления (крюка)
 (Н·м),
(Н·м),
где
 ,
,
где ![]() – коэффициент относительной загрузки механизма
– коэффициент относительной загрузки механизма
 ;
;
- при опускании пустого захватного приспособления (крюка)
 (Н·м).
(Н·м).
2.6. Определение мощностей, развиваемых двигателем при статической нагрузке. Построение механической характеристики
 (Н·м);
(Н·м);
 (Н·м);
(Н·м);
 (Н·м);
(Н·м);
 (Н·м);
(Н·м);
 (об/мин);
(об/мин);
![]() (Н·м).
(Н·м).
По
механической характеристике ![]() (рис. 2.1) при
заданных значениях
(рис. 2.1) при
заданных значениях ![]() ,
, ![]() ,
,
![]() ,
, ![]() определяем
значения частот вращения:
определяем
значения частот вращения: ![]() =587,5 об/мин;
=587,5 об/мин;
![]() =592,5 об/мин;
=592,5 об/мин; ![]() =599,5 об/мин;
=599,5 об/мин; ![]() =600,5 об/мин.
=600,5 об/мин.
Рис. 2.1
Установившееся значение скорости при различных режимах работы механизма подъема:
 (м/с);
(м/с);
 (м/с);
(м/с);
 (м/с);
(м/с);
 (м/с).
(м/с).
Установившееся значение мощности при различных режимах работы механизма подъема:
 (кВт);
(кВт);
 (кВт);
(кВт);
 (кВт);
(кВт);
 (кВт).
(кВт).
2.7. Определение динамической нагрузки двигателя
Считаем,
что управление двигателем осуществляется с помощью контакторного контроллера,
при котором пуск в ход происходит в функции времени. Задаемся временем пуска ![]() =3,5 с, одинаковым для всех четырех
режимов работы. Определяем для каждого режима работы величину динамического
момента:
=3,5 с, одинаковым для всех четырех
режимов работы. Определяем для каждого режима работы величину динамического
момента:
- при подъеме полного груза

![]() (Н·м),
(Н·м),
где ![]() – время пуска, с;
– время пуска, с;
![]() – суммарный вес
поднимаемого груза, кг;
– суммарный вес
поднимаемого груза, кг;
![]() – частота
вращения ротора двигателя, об/мин;
– частота
вращения ротора двигателя, об/мин;
![]() – скорость
перемещения груза при соответствующей операции, м/с;
– скорость
перемещения груза при соответствующей операции, м/с;
![]() – КПД механизма
подъема при соответствующей операции. При спуске и подъеме пустого крюка
– КПД механизма
подъема при соответствующей операции. При спуске и подъеме пустого крюка ![]() , а при опускании груза
, а при опускании груза ![]() помещается не в знаменателе, а в
числителе;
помещается не в знаменателе, а в
числителе;
- при опускании полного груза

![]() (Н·м);
(Н·м);
- при подъеме пустого захватного приспособления (крюка)

![]() (Н·м);
(Н·м);
- при спуске пустого захватного приспособления (крюка)

![]() (Н·м).
(Н·м).
2.8. Определение пусковых моментов:
- при подъеме груза
![]() (Н·м);
(Н·м);
- при опускании груза (применяем торможение противовключением)
![]() (Н·м);
(Н·м);
- при опускании груза при торможении с отдачей энергии в сеть (обычный способ опускания тяжелых грузов)
![]() (Н·м);
(Н·м);
- при подъеме крюка
![]() (Н·м);
(Н·м);
- при спуске крюка
![]() (Н·м).
(Н·м).
Проверка двигателя на наибольший пусковой момент:
![]()
![]()
![]() .
.
2.9. Определение времени работы с установившейся скоростью:
- при подъеме полного груза
 (с),
(с),
где ![]() – средняя высота подъема груза, м;
– средняя высота подъема груза, м;
![]() – скорость передвижения груза при
различных операциях, м/с;
– скорость передвижения груза при
различных операциях, м/с;
![]() – заданное время пуска, с;
– заданное время пуска, с;
![]() – время замедления груза от момента
отключения двигателя до момента его остановки под действием механического
тормоза, с. Для всех операций принимается равным 2 с;
– время замедления груза от момента
отключения двигателя до момента его остановки под действием механического
тормоза, с. Для всех операций принимается равным 2 с;
- при опускании полного груза
 (с);
(с);
- при подъеме крюка
 (с);
(с);
- при спуске крюка
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.