где ![]() - приращения
декартовых координат объекта в проекциях на географические оси, измеряемые в
доплеровском канале современной ПА GPS/ГЛОНАСС
с дискретностью
- приращения
декартовых координат объекта в проекциях на географические оси, измеряемые в
доплеровском канале современной ПА GPS/ГЛОНАСС
с дискретностью ![]() ;
;
 - приращения декартовых
координат, вычисляемые по данным БИНС о скорости движения объекта.
- приращения декартовых
координат, вычисляемые по данным БИНС о скорости движения объекта.
Соотношения (9.2.1) могут быть приведены к виду:
 (9.2.2)
(9.2.2)
где
![]() - погрешности доплеровского канала ПА GPS/ГЛОНАСС;
- погрешности доплеровского канала ПА GPS/ГЛОНАСС;
![]() - реальные шумы скоростных
измерений.
- реальные шумы скоростных
измерений.
· Позиционные измерения (для периодической коррекции погрешностей выработки координат места)
 (9.2.3)
(9.2.3)
где  - погрешности дальномерного канала ПА GPS/ГЛОНАСС;
- погрешности дальномерного канала ПА GPS/ГЛОНАСС;
![]() - динамическая составляющая
вертикальной качки морского надводного объекта (с точностью до превышения геоида),
которая может быть аппроксимирована марковским процессом второго порядка с
- динамическая составляющая
вертикальной качки морского надводного объекта (с точностью до превышения геоида),
которая может быть аппроксимирована марковским процессом второго порядка с ![]() м.
м.
· Курсовое измерение (привлекается в условиях стенда)
![]() , (9.2.4)
, (9.2.4)
где
![]() - шумы измерений, включающие
флуктуационную составляющую.
- шумы измерений, включающие
флуктуационную составляющую.
В автономном режиме работы БИНС используются только данные относительного лага и априорная информация о высоте (глубине) корабля.
· Скоростные измерения (по лагу):
 (9.2.5)
(9.2.5)
где ![]() и
и ![]() - морские
течения,
- морские
течения, ![]() - шумы измерений, включающие
неизмеряемую лагом поперечную составляющую вектора скорости корабля и
инструментальные погрешности лага и аппроксимированные белыми шумами с
дисперсией
- шумы измерений, включающие
неизмеряемую лагом поперечную составляющую вектора скорости корабля и
инструментальные погрешности лага и аппроксимированные белыми шумами с
дисперсией ![]() на
частоте 1 гц.
на
частоте 1 гц.
· Позиционное измерение (по высоте)
![]() (9.2.6)
(9.2.6)
которое совпадает с третьим измерением в (9.2.3).
Управления (сигналы демпфирования и коррекции)
При
использовании стационарного фильтра в интересах обеспечения минимального
времени переходных процессов в системе управления ![]() ,
формируемые в фильтре, подаются по обеим составляющим вектора состояния северного
и восточного каналов контура вертикали системы (т.н. «жесткое» демпфирование). Т.е.
согласно измерениям (9.2.2) будем иметь:
,
формируемые в фильтре, подаются по обеим составляющим вектора состояния северного
и восточного каналов контура вертикали системы (т.н. «жесткое» демпфирование). Т.е.
согласно измерениям (9.2.2) будем иметь:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
 ,
,
![]() ,
, ![]() ,
,
![]() ,
, ![]() (9.2.7)
(9.2.7)
где
![]() коэффициенты демпфирования
вертикали (режим
горизонтирования) и
коэффициенты демпфирования
вертикали (режим
горизонтирования) и ![]() управления в азимутальном канале (режим гирокомпасирования),
определяющие «веса» поступающих измерений, выбираются из условия обеспечения
оптимальных с точки зрения погрешностей ориентации динамических характеристик БИНС и могут быть выбраны из
следующих соотношений:
управления в азимутальном канале (режим гирокомпасирования),
определяющие «веса» поступающих измерений, выбираются из условия обеспечения
оптимальных с точки зрения погрешностей ориентации динамических характеристик БИНС и могут быть выбраны из
следующих соотношений:
![]() , (9.2.8)
, (9.2.8)
где ![]() –относительный
коэффициент демпфирования,
–относительный
коэффициент демпфирования, ![]() - частота
колебаний в демпфируемом контуре вертикали;
- частота
колебаний в демпфируемом контуре вертикали;
![]() =0.03…0.1;
=0.03…0.1;
![]() =
=![]() =
=![]() =1/Tz - коэффициенты разовой коррекции по координатам места, Tz – дискретность измерений GPS.
=1/Tz - коэффициенты разовой коррекции по координатам места, Tz – дискретность измерений GPS.
При «слабом» демпфировании контура вертикали
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
, ![]() (9.2.9)
(9.2.9)
где  -
шулеровская частота.
-
шулеровская частота.
В данном режиме для демпфирования шулеровских колебаний погрешностей аналога вертикали БИИМ и обеспечения устойчивости его вертикальному каналу используется информация относительного лага и глубиномера или высотомера; данные ПА СНС привлекаются эпизодически для коррекции погрешностей аналога ИСК БИИМ. Положим в модели (9.1.1) погрешностей БИИМ, что управления будут равны:
![]() ;
;
![]()
![]() ,
, ![]() (9.3.1)
(9.3.1)
- сигналы
управления, использующие данные БИИМ и данные ![]() относительного
лага для демпфирования шулеровских колебаний погрешностей аналога вертикали
БИИМ;
относительного
лага для демпфирования шулеровских колебаний погрешностей аналога вертикали
БИИМ;
здесь ![]() - составляющие морских течений;
- составляющие морских течений; ![]() -
относительный коэффициент демпфирования;
-
относительный коэффициент демпфирования;
Погрешности аналога ИСК
Для нахождения аналитических решений для погрешностей аналога ИСК БИИМ на ДУС типа ЛГ или ВОГ в автономном режиме работы воспользуемся его моделью погрешностей и учтем сделанные ранее допущения:
![]()
где
 ,
, (9.3.2)
(9.3.2)
![]()
Здесь
 (9.3.3)
(9.3.3)
 (9.3.4)
(9.3.4)
 (9.3.5)
(9.3.5)
где ![]()
![]() и
и![]()
![]() -
проекции вектора
-
проекции вектора ![]() нескомпенсированных
дрейфов ДУС соответственно на оси связанной с объектом системы координат
нескомпенсированных
дрейфов ДУС соответственно на оси связанной с объектом системы координат ![]() и на оси горизонтной системы
координат с географической ориентацией осей
и на оси горизонтной системы
координат с географической ориентацией осей ![]() ;
;
![]() - значения ошибок оценки
погрешностей БИИМ на момент окончания калибровки или протяженной коррекции
системы по данным СНС, как результат решения задачи фильтрации при совместной
обработке их информации.
- значения ошибок оценки
погрешностей БИИМ на момент окончания калибровки или протяженной коррекции
системы по данным СНС, как результат решения задачи фильтрации при совместной
обработке их информации.
Собственные значения матрицы ![]() (собственные
частоты системы) найдем из характеристического уравнения
(собственные
частоты системы) найдем из характеристического уравнения
![]() или
или ![]() (9.3.6)
(9.3.6)
Откуда
![]() (9.3.7)
(9.3.7)
а переходная матрица состояния системы при принятых допущениях будет равна
 (9.3.8)
(9.3.8)
Положим, что дрейфы гироскопов в
проекциях на оси горизонтной системы
координат ![]() , связанной с курсом объекта, можно
представить здесь приближенно в виде суммы детерминированной в одном пуске БИИМ
и флуктуационной составляющих. Причем детерминированная часть дрейфов включает
постоянные
, связанной с курсом объекта, можно
представить здесь приближенно в виде суммы детерминированной в одном пуске БИИМ
и флуктуационной составляющих. Причем детерминированная часть дрейфов включает
постоянные ![]() и колебательные составляющие с
частотами качки и автокомпенсационного (модуляционного) вращения ИБ БИИМ
и колебательные составляющие с
частотами качки и автокомпенсационного (модуляционного) вращения ИБ БИИМ
 , (
, (![]() );
);
Флуктуационная
часть дрейфов аппроксимируется марковскими процессами первого порядка с
параметрами ![]() .
.
Тогда согласно выражениям (9.3.3)…( 9.3.5)

в случае, если
![]()
 (9.3.9)
(9.3.9)
и тогда для погрешностей аналога ИСК в соответствии с решениями (9.1.4), (9.1.9) получим следующие аналитические зависимости.
Для средних значений:
 (9.3.10)
(9.3.10)
|
|
Рис.3.1.
|
|
Рис.3.2.
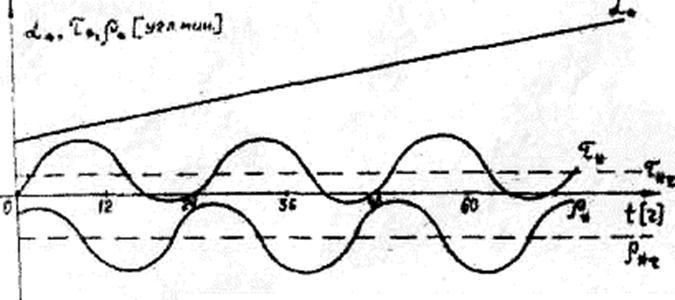
Уравнения
ошибок ![]() аналога оси
аналога оси ![]() суточного
вращения Земли можно приближенно представить в виде
суточного
вращения Земли можно приближенно представить в виде
 (9.3.11)
(9.3.11)
где ![]() ,
,
 .
.
Из уравнений (9.3.11)
следует, что колебания аналога в плоскостях углов ![]() и
и
![]() смещены относительно друг друга на
смещены относительно друг друга на ![]() .
.
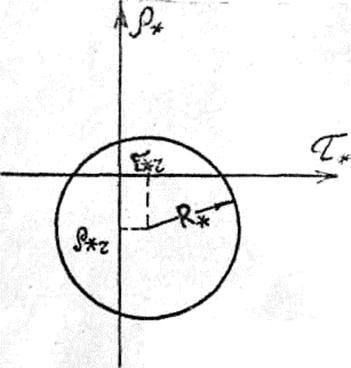
Исключив из
уравнений (9.3.11) время t,
найдем уравнение траектории оси ![]() аналога оси
суточного вращения Земли на картинной плоскости
аналога оси
суточного вращения Земли на картинной плоскости ![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.