









5.2 Способы регулирования скорости вращения в двигателе постоянного тока
Из анализа уравнения механической характеристики
 (5.91)
(5.91)
следует, что скорость вращения якоря можно регулировать за счет скорости вращения якоря при холостом ходе или просадки по скорости.
В свою очередь, из скоростных характеристик следует, что скорость вращения якоря при холостом ходе можно регулировать изменением питающего напряжения обмотки якоря или изменением потока.
А просадку по скорости можно изменять за счет изменения сопротивления пускового реостата, включенного последовательно в цепь обмотки якоря и изменением потока.
Из чего следуют способы регулирования скорости вращения якоря в двигателе постоянного тока:
1. Изменением питающего напряжения обмотки якоря. Для реализации данного способа необходим преобразователь – управляемый выпрямитель.
2. Изменением потока – полюсное регулирование. Для реализации данного способа необходим управляемый выпрямитель для питания цепи обмотки возбуждения или изменением переменного сопротивления в цепи обмотки возбуждения.
3. Изменением сопротивления пускового реостата, включенного последовательно в цепь обмотки якоря – реостатное регулирование.
Регулирование скорости вращения якоря, изменением питающего напряжения обмотку якоря.
I зона регулирования
Предположим, двигатель постоянного тока с независимым возбуждением включен в сеть с номинальными напряжением якоря, напряжением обмотки возбуждения и работает на номинальную нагрузку, при этом якорь вращается с номинальной скоростью
Так как напряжение, питающее обмотку якоря, уже имеет номинальное значение, то увеличение напряжения якоря выше номинального – нецелесообразно.
Поэтому, регулирование скорости вращения якоря относительно номинальной изменением напряжения якоря - I зона регулирования.
В первой зоне регулирования изменение скорости вращения якоря всегда происходит за счет изменения напряжения якоря – напряжение якоря уменьшается ниже номинального значения.
 (5.92)
(5.92)
 (5.93)
(5.93)
Тогда из уравнения движения следует:


![]()
 (5.94)
(5.94)
Из чего следует, что снижение напряжения якоря, которое привело к уменьшению момента электромагнитного и как следствие к уменьшению скорости вращения якоря. В свою очередь за счет свойства саморегулирования в двигателе постоянного тока уменьшение скорости вращения якоря привело к увеличению тока якоря и как следствие к увеличению момента электромагнитного. И скорость вращения якоря будет уменьшаться до тех пор, пока увеличивающийся момент электромагнитный опять не выровняется с моментом нагрузки. При этом якорь будет вращаться с установившейся скоростью, меньшей скорости номинальной.
 (5.95)
(5.95)
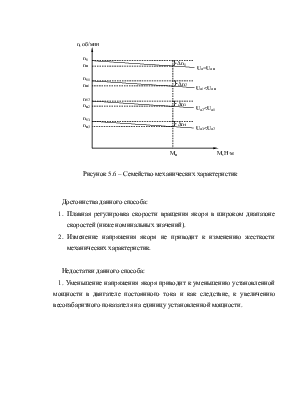
На основании рассмотренных электромагнитных процессов построим семейство механических характеристик, соответствующих данному способу регулирования скорости вращения.
Достоинства данного способа:
1. Плавная регулировка скорости вращения якоря в широком диапазоне скоростей (ниже номинальных значений).
2. Изменение напряжения якоря не приводит к изменению жесткости механических характеристик.
Недостатки данного способа:
1. Уменьшение напряжения якоря приводит к уменьшению установленной мощности в двигателе постоянного тока и как следствие, к увеличению весогабаритного показателя на единицу установленной мощности.
Регулирование скорости вращения якоря, изменением потока.
Полюсное регулирование.
II зона регулирования.
Предположим, двигатель постоянного тока включен в сеть с номинальными напряжением якоря и напряжением обмотки возбуждения, работает на номинальную нагрузку, при этом якорь вращается с номинальной скоростью.
Так как питающее напряжение обмотку возбуждения имеет номинальное значение, при котором поток - номинальный, то из анализа вебер-амперной характеристики, нецелесообразно увеличивать напряжение возбуждения, ток возбуждения, так как изменение тока возбуждения приведет к незначительному изменению потока.
Из чего следует, что изменение потока за счет тока возбуждения целесообразно производить в сторону уменьшения.
Предположим, уменьшив питающее напряжение обмотку возбуждения или увеличив сопротивление в цепи обмотки возбуждения. С целью автоматического управления скоростью целесообразно уменьшить поток за счет питающего напряжения обмотку возбуждения.
 (5.96)
(5.96)
Так как момент нагрузки и питающее напряжение обмотку якоря величины
постоянные, то уменьшение потока приведет
![]()
 (5.97)
(5.97)
 (5.98)
(5.98)
Так как влияние потока за счет тока возбуждения, который составляет единицы ампер, во много раз меньше на момент электромагнитный и момент нагрузки, чем влияние тока якоря, который составляет десятки-сотни ампер.
Из чего следует, что уменьшение потока, которое привело к увеличению тока якоря, в конечном итоге приведет к увеличению момента электромагнитного, что соответствует уравнению механической характеристики:
 (5.99)
(5.99)
Так как при полюсном регулировании скорость вращения якоря изменяется в сторону увеличения относительно номинального значения – II зона регулирования.
Тогда:

![]()
 (5.100)
(5.100)
Уменьшение потока за счет тока возбуждения, которое привело к увеличению момента электромагнитного и как следствие к увеличению скорости; в свою очередь увеличение скорости, которое приводит к уменьшению момента электромагнитного (процесс саморегулирования в двигателе постоянного тока) будет происходить до тех пор, пока уменьшающийся момент электромагнитный опять не выровняется с моментом нагрузки.
При этом:
 (5.101)
(5.101)
Из анализа электромагнитных процессов при полюсном регулировании следует:
1. при уменьшении потока скорость увеличивается за счет увеличения скорости идеального холостого хода
2. при уменьшении потока жесткость механической характеристики уменьшается
На основании рассмотренных электромагнитных процессов построим семейство механических характеристик, соответствующих данному способу регулирования скорости вращения.
 |
Достоинства данного способа:
1. Слаботочной силовой частью в цепи обмотки возбуждения возникает возможность регулировать скорость вращения ротора в диапазоне выше номинальных значений.
2. Почти линейная зависимость между скоростью и потоком.
3. Плавная регулировка скорости вращения.
Недостатки данного способа:
1. Невозможность регулировки скорости в первой зоне, то есть ниже номинальных значений.
Данный способ в основном применяется для стабилизации скорости при изменении нагрузки на валу.
То есть если возникает необходимость в регулировании скорости в широком диапазоне скоростей и стабилизации с требуемой точностью на заданном уровне, то целесообразно применить двух зонное регулирование и стабилизацию:
I зона – за счет изменения питающего напряжения обмотку якоря, которое позволит обеспечить плавную регулировку в широком диапазоне скоростей.
II зона – за счет изменения потока, обеспечение стабилизации скорости.
Регулирование скорости вращения якоря, изменение сопротивления пускового реостата, включаемого последовательно в цепь обмотки якоря
Предположим, двигатель постоянного тока включен на номинальные напряжение якоря и напряжение возбуждения, работает на номинальную нагрузку, при этом ротор вращается с номинальной скоростью
Предположим, посредством электромеханических и ил механических коммутаторов увеличили сопротивление пускового реостата
![]() (5.102)
(5.102)
Тогда за счет процесса саморегулирования – выравнивания момента электромагнитного и момента нагрузки за счет скорости

![]() (5.103)
(5.103)
То есть увеличение сопротивления пускового реостата приведшее к уменьшению момента электромагнитного, и как следствие, к уменьшению скорости. В свою очередь, уменьшение скорости, которое приводит к увеличению момента электромагнитного, будет происходить до тех пор, пока опять момент электромагнитный не стане равен моменту нагрузки. При этом якорь будет вращаться с установившейся скоростью
 (5.104)
(5.104)
На основании рассмотренных электромагнитных процессов построим семейство механических характеристик, соответствующих данному способу регулирования скорости вращения.
 |
Изменение сопротивления пускового реостата не приводит к изменению скорости идеального холостого хода, а изменяет лишь просадку по скорости, то есть регулирование скорости за счет изменения сопротивления пускового реостата обусловлено изменением жесткости механических характеристик.
Так как сопротивление пускового реостата включается в цепь обмотки якоря последовательно, то при введении сопротивления увеличиваются потери на сопротивлении, и как следствие, приводят к уменьшению установленной мощности двигателя постоянного тока, к увеличению массогабаритного показателя на единицу установленной мощности, и к уменьшению коэффициента полезного действия привода вцелом.
Достоинства данного способа:
1. плавная регулировка скорости вращения ротора в широком диапазоне скоростей.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.