





СПОСОБЫ РЕГУЛИРОВАНИЯ СКОРОСТИ В ДВИГАТЕЛЕ
ПОСТОЯННОГО ТОКА
Регулирование скорости вращения якоря изменением питающего напряжения обмотки якоря ( І зона регулирования).
Пусть дпт с независимым возбуждением включен в сеть с номинальным напряжением якоря и номинальным напряжением возбуждения, при этом якорь вращается с номинальной скоростью.
![]() Uя=Uян
n= nн
Uя=Uян
n= nн
Uв=Uвн
Мс=Мн
Т.к напряжение якоря уже имеет номинальное значение, то увеличивать напряжение якоря выше номинального не стоит. Следовательно, регулирование скорости вращения относительно номинального, варьированием напряжения якоря, - І зона регулирования.

![]()
Ф ≠ f (Uя)
![]()
![]()
![]() ↓ Fэ=Ф*↓ Iя
↓ Fэ=Ф*↓ Iя ![]() ↓ Мэ=2*↓ Fэ* R
↓ Мэ=2*↓ Fэ* R
↓ Iя ↓ Мэ= се*Ф*↓Iя
Тогда из уравнения движения ↓ Мэ – Мс =К*J*dn/dt , следовательно
dn/dt<0 ![]() n ↓ .
Поэтому Ея = се*Ф*↓n
n ↓ .
Поэтому Ея = се*Ф*↓n ![]()
![]()
![]() Ф ≠ f (Uя)
Ф ≠ f (Uя)
![]()
![]()
![]() ↑
Fэ=Ф* ↑ Iя
↑
Fэ=Ф* ↑ Iя
![]() ↑
Мэ=2*↑ Fэ* R
↑
Мэ=2*↑ Fэ* R
↑ Iя ↑ Мэ= се*Ф*↑ Iя
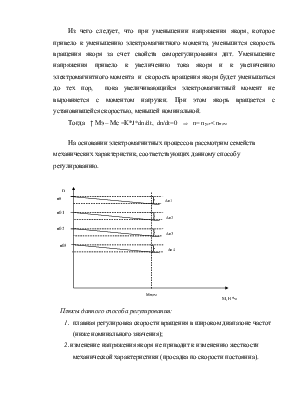
Из чего следует, что при уменьшении напряжения якоря, которое привело к уменьшению электромагнитного момента, уменьшится скорость вращения якоря за счет свойств саморегулирования дпт. Уменьшение напряжения привело к увеличению тока якоря и к увеличению электромагнитного момента и скорость вращения якоря будет уменьшаться до тех пор, пока увеличивающийся электромагнитный момент не выровняется с моментом нагрузки. При этом якорь вращается с установившейся скоростью, меньшей номинальной.
Тогда ↑ Мэ – Мс =К*J*dn/dt, dn/dt=0
![]() n= nуст< nном
n= nуст< nном
На основании электромагнитных процессов рассмотрим семейств механических характеристик, соответствующих данному способу регулированию.
Плюсы данного способа регулирования:
1. плавная регулировка скорости вращения в широком диапазоне частот (ниже номинального значения);
2. изменение напряжения якоря не приводит к изменению жесткости механической характеристики (просадка по скорости постоянна).
Минусы данного способа регулирования:
1. уменьшение напряжения питания приводит к уменьшению установленной мощности дпт, следовательно, к увеличению весогабаритных показателей на единицу установленной мощности.
Регулирование скорости вращения ротора изменением потока – полюсное регулирование( ІІ зона ).
Пусть дпт включен в сеть с номинальным напряжением якоря и номинальным напряжением возбуждения, работает на номинальную, нагрузку при этом якорь вращается с номинальной скоростью.
![]() Uя=Uян
n= nн
Uя=Uян
n= nн
Uв=Uвн
Мс=Мн
Т.к напряжение обмотки возбуждения имеет номинальное значение, при котором поток номинальный. То из анализа вебер-амперной характеристики следует, что не целесообразно увеличивать ток возбуждения и напряжение возбуждения. Потому что изменение тока возбуждения приведет к незначительным изменениям потока. Из чего следует, что изменение потока за счет тока возбуждения следует производить в сторону уменьшения.
Пусть уменьшим напряжение питания обмотки возбуждения или увечим сопротивление цепи обмотки возбуждения. С целью автоматизации управления скоростью лучше поток уменьшить за счет напряжения питания обмотки возбуждения.

Т.к. момент нагрузки, напряжение питания обмотки якоря величины постоянные, то уменьшение потока приведет:
↓ Ф
![]()
![]()
![]()
![]() ↑↓ Fэ=↓Ф* ↑
Iя
↑↓ Fэ=↓Ф* ↑
Iя ![]() ↑↓Мэ=2*↑ ↓ Fэ* R
↑↓Мэ=2*↑ ↓ Fэ* R
↑ Iя =  ↑↓Мэ= се*Ф*↑↓ Iя
↑↓Мэ= се*Ф*↑↓ Iя
![]()
![]() ↑↓ Мэ – Мс =К*J*dn/dt
↑↓ Мэ – Мс =К*J*dn/dt ![]() dn/dt< >0
dn/dt< >0 ![]() n ↓↑
n ↓↑
Т.к влияние потока на электромагнитный момент, электромагнитную силу, за счет изменения тока возбуждения (единицы ампер), во много раз меньше, чем влияние тока якоря (десятки – сотни ампер). Следовательно, уменьшение потока, которое привело к увеличению тока якоря, в конечном итоге приведет к увеличению электромагнитного момента (что соответствует уравнению механической характеристики).

Т.к. при полюсном регулировании скорость вращения ротора изменяется в сторону увеличения относительно номинальной, то это ІІ зона регулирования.

Ф ≠ f (n) – const (Ф < Ф ном)
![]()
![]()
![]()
![]() ↓ Fэ=Ф* ↓ Iя
↓ Fэ=Ф* ↓ Iя ![]() ↓ Мэ=2*↓ Fэ* R
↓ Мэ=2*↓ Fэ* R
↓ Iя ↓ Мэ= се*Ф*↓ Iя
Уменьшение потока за счет тока возбуждения, которое привело к увеличению электромагнитного момента и как следствие, к увеличению скорости вращения якоря, которая приводит к уменьшению электромагнитного момента (процесс саморегулирования в дпт) будет происходить до тех пор, пока уменьшающийся электромагнитный момент опять не выровняется с моментом нагрузки на валу двигателя.
↓ Мэ – Мс =К*J*dn/dt, dn/dt=0
![]() n= nуст> nном
n= nуст> nном
Из анализа электромагнитных процессов при полюсном регулировании следует, что
1. при уменьшении потока, увеличивается скорость вращения якоря за счет увеличения скорости идеального холостого хода;
2. при уменьшении потока, жесткость механической характеристики уменьшается (за счет увеличения просадки по скорости)
Плюсы данного способа регулирования:
1. слаботочная силовая часть цепи обмотки возбуждения, возникает возможность регулировать скорость вращения якоря в диапазоне выше номинального;
2. почти линейная зависимость между скоростью вращения и потоком;
3. плавная регулировка скорости вращения.
Минусы данного способа регулирования:
1. невозможность регулировки скорости вращения в первой зоне
(когда n<nном);
Данный способ в основном применяется для стабилизации скорости вращения якоря при изменении нагрузки на валу. Т.е. если возникает необходимость в регулировании скорости вращения якоря в широком диапазоне скоростей и стабилизации с требуемой точностью на заданном уровне, то целесообразно применять двузонное регулирование:
І зона – за счет изменения напряжения якоря, которая позволит обеспечить плавную регулировку в широком диапазоне скоростей.
ІІ зона – за счет изменения потока, обеспечение стабилизации скорости вращения.
Регулирование скорости вращения изменением сопротивления пускового
реостата, включенного последовательно в цепь обмотки якоря.
Пусть дпт включен под номинальное напряжение обмотки якоря и обмотки возбуждения, работает на номинальную нагрузку, при этом ротор вращается с номинальной скоростью.
![]() Uя=Uян
n= nн
Uя=Uян
n= nн
Uв=Uвн
Мс=Мн
Пусть с помощью электромеханических или электронных коммутаторов увеличим сопротивление пускового реостата.
Ф ≠ f (Rп) – const
![]()
![]()
![]()
![]() ↓ Fэ=Ф* ↓ Iя
↓ Fэ=Ф* ↓ Iя ![]() ↓ Мэ=2*↓ Fэ* R
↓ Мэ=2*↓ Fэ* R
↓ Iя ↓ Мэ= се*Ф*↓ Iя
Тогда ↓ Мэ – Мс =К*J*dn/dt, dn/dt < 0 ![]() n↓. За счет процесса
саморегулирования получим , что
n↓. За счет процесса
саморегулирования получим , что

Ф ≠ f (n) – const
![]()
![]()
![]()
![]() ↑
Fэ=Ф* ↑ Iя
↑
Fэ=Ф* ↑ Iя
![]() ↑
Мэ=2*↑ Fэ* R
↑
Мэ=2*↑ Fэ* R
↑ Iя ↑ Мэ= се*Ф*↑ Iя
Т.е. увеличение пускового сопротивления привело к уменьшению электромагнитного момента, следовательно, и к уменьшению скорости вращения якоря, что привело к увеличению электромагнитного момента. Это будет происходить до тех пор пока электромагнитный момент не станет равный моменту нагрузки на валу двигателя. При этом ротор будет вращаться с установившейся скоростью.
↑ Мэ – Мс =К*J*dn/dt, dn/dt=0
![]() n= nуст< nном
n= nуст< nном
Изменение пускового сопротивления не приводит к изменению скорости идеального холостого хода, а изменяет лишь просадку по скорости, т.е. регулирование скорости вращения якоря за счет изменения пускового сопротивления обуславливается изменением жесткости механической характеристики при изменении пускового сопротивления.
Плюсы данного способа регулирования:
1. плавная регулировка скорости ротора в широком диапазоне скоростей.
Минусы данного способа регулирования:
1. т.к. пусковое сопротивление включается в цепь обмотки якоря, то при введении сопротивления (Rп>0) увеличиваются потери на пусковом сопротивлении;
2. что приводит к уменьшению установленной мощности дпт;
3. увеличивается массогабаритный показатель на единицу установленной мощности;
4. уменьшение кпд привода вцелом.
Т.к. регулировка скорости вращения якоря необходима в І зоне, то к наиболее оптимальному из всех способов для нашего привода можно отнести регулирование скорости вращения якоря изменением напряжения питания обмотки якоря. При этом возможна плавная регулировка скорости вращения в широком диапазоне скоростей, нет изменения жесткости механической характеристики при изменении напряжения питания обмотки якоря.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.