




Необходимо разработать измеритель малых перемещений объекта от определённой точки в одном заданном направлении . В качестве измерительного преобразователя применяется индуктивный датчик с подвижным сердечником , механически связанным с объектом . Если такой датчик включён частотозадающим элементом в схему релаксационного LR-генератора , то выходное напряжение генератора представляет собой последовательность симметричных двухполярных прямоугольных импульсов .
Частота релаксационного
генератора линейно изменяется в пределах от 2 до 1 КГц для изменения
перемещений в диапазоне соответственно от 0 до 5 мм . Для перемещения ![]() относительно определённого нулевого
значения можно записать :
относительно определённого нулевого
значения можно записать :
![]() - тактовая
частота МПС , стабилизированная кварцевым резонатором ;
- тактовая
частота МПС , стабилизированная кварцевым резонатором ;
![]() -постоянный коэффициент ;
-постоянный коэффициент ;
![]() -
число импульсов частоты
-
число импульсов частоты ![]() ,
укладывающееся в интервал времени
,
укладывающееся в интервал времени ![]() ;
;
Допустимая погрешность измерения перемещения ![]()
![]() .
.
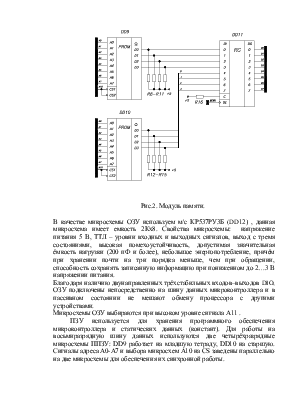
МП КР1821ВМ85А
ПЗУ – КР556РТ4
ОЗУ – КР537РУ3Б
Порты ввода/вывода – регистры серии КР1533
![]()
Современный уровень развития энергетических и других промышленных установок характеризуется интенсификацией технологических процессов с использованием агрегатов большой мощности. Например, в теплоэнергетике единичные мощности возросли за 30 лет в десятки раз, а в атомной энергетике – в сотни раз. Примерно так же возросли скорости протекания технологических процессов, число измеряемых параметров на одном агрегате, которое в настоящее время исчисляется тысячами.
Поэтому надёжность средств измерения и информационно-измерительных систем во многих случаях определяют надёжность агрегата в целом. Без достоверных значений параметров и автоматического контроля за этими значениями, в большинстве случаев нельзя управлять процессом или агрегатом, без средств измерения невозможна автоматизация. Особенно большое значение приобретают вопросы получения достоверных значений измеряемых параметров в связи с задачами комплексной автоматизации технологических процессов и более эффективного использования производственного потенциала. Решение этих задач требует анализа процессов и их технико-экономических показателей, а для этого нужны надёжные и точные средства измерения.
Вопросам измерения технологических параметров, разработке новых средств и методов измерения, повышению точности измерений во всех странах уделяется большое внимание.
В данном курсовом проекте разрабатывается измеритель малых перемещений объекта от определённой точки в одном заданном направлении. В качестве измерительного преобразователя применяется индуктивный датчик с подвижным сердечником , механически связанным с объектом . Принцип работы измерителя должен быть основан на подсчете числа импульсов фиксированной частоты за период измеряемого сигнала .
2. Разработка принципиальной схемы измерителя перемещений.
2.1. Модуль процессора.
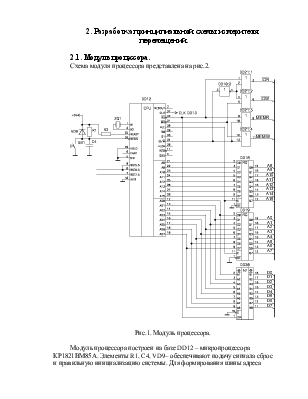
Схема модуля процессора представлена на рис.2.
Рис.1. Модуль процессора.
Модуль процессора построен на базе DD12 – микропроцессора КР1821ВМ85А. Элементы R1, C4, VD9– обеспечивают подачу сигнала сброс и правильную инициализацию системы. Для формирования шины адреса используются регистры защёлки DD18, DD19, в которых запоминается адрес с выходов процессора по сигналу ALE.
Для формирования шины адреса и обеспечения нагрузочной способности используется двунаправленный приёмопередатчик DD20. Направление передачи данных выбирается по сигналу RD микропроцессора. В циклах чтения по низкому уровню сигнала RD данные передаются через DD20 от системной шины данных к микропроцессору. Всё остальное время от микропроцессора на шину данных микроконтроллера. Элементы DD21(К1533ЛЛ1) формируют управляющие сигналы чтения и записи для остальных модулей микроконтроллера. В циклах обращения к памяти, при низком уровне сигнала IO/M сигналы чтения и записи RD или WR от микропроцессора через элементы DD21.3 и DD21.4 преобразуются в сигналы MEMW и MEMR. В циклах обращения к портам ввода вывода ( высоком уровне сигнала IO/M ) через элементы DD21.1 и DD21.2 формируются сигналы IOR, IOW.
2.2. Описание и работа блока счетчика.
Блок счетчика построен на микросхеме КР580ВИ53. Предназначен для подсчета числа импульсов за определенный период времени. Микросхема КР580ВИ53 предназначена для организации работы микропроцессорных систем в режиме реального времени. Микросхема формирует сигналы с различными временными параметрами.
Программируемы таймер реализован в виде трех независимых 16-ти разрядных каналов с общей схемой управления. Каждый канал может работать в 6 режимах. Программирование режимов работы каналов осуществляется индивидуально и в произвольном порядке путем ввода управляющих слов в регистры каналов, а в счетчики – запрограммированного числа байтов.
Управляющее слово определяет режим работы канала, тип счета (двоичный или двоично-десятичный), формат чисел (одно- или двухбайтовый).
Обмен информацией осуществляется по 8-ми разрядному двунаправленному каналу данных.
Максимальное значение счета: в двоичном коде 216; в двоично-десятичном коде 104.
Частота синхронизации каналов 0-2,5МГц.
Управляющим словом для КР580ВИ53 является:
|
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
|
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.