













































Рассчитать схему телеизмерений параметров технологического процесса.
Составить и рассчитать принципиальную схему устройства.
Построить зависимость выходного и оконечного преобразования от измеряемого параметра (t °С).
Оценить влияние дрейфа параметров линии связи и уровня шумов на характеристики устройств.
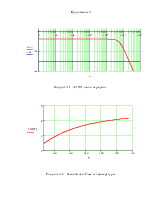
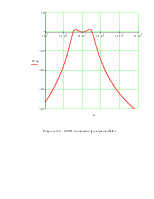
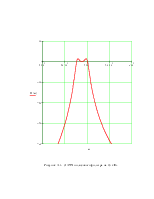
Построить АЧХ полосовых фильтров применяемых в устройстве.
Выбрать функциональную схему устройства.
Диапазон изменения температуры датчика:
Tmin = 100 °С Tmax = 150 °C
Диаметр жилы провода: d = 1,15 мм
Расстояние между жилами: p = 4,7 мм
Длина линии связи: l = 4100 м
Реферат
Пояснительная записка содержит: 54стр., 15 рис., 7 источников, 2 приложения.
Объект исследования: устройство телепередачи данных, содержащее два канала.
Цель роботы: разработка устройства, осуществляющего передачу информации о температуре контролируемого объекта с использованием амплитудной модуляции, составить и рассчитать принципиальную схему расчета.
Метод исследования: математическое моделирование.
Что сделано: разработано устройство, осуществляющее передачу информации о температуре контролируемого объекта с использованием амплитудной модуляции.
СИСТЕМА ТЕЛЕИЗМЕРЕНИЙ, ЛИНИЯ СВЯЗИ, МОДУЛЯЦИЯ, ТЕЛЕПЕРЕДАЧА, ФИЛЬТР
Введение………………………….....……………………………………………5
Аналитический обзор …………………………………………………………...7
1 Расчет структурной схемы устройства……………………………………...11
2 Расчет принципиальной схемы……………………………………………...24
2.1 Расчет первичных параметров линии связи…………………………...12
2.2 Расчет усилителей………………………………………………………..14
2.3 Расчет преобразователей постоянного напряжения в переменное…...16
2.4 Расчет модуляторов………………………………………………………17
2.5 Расчет полосовых фильтров……………………………………………..22
2.6 Расчет сумматора………………………………………………………....34
2.7 Расчет усилителя мощности……………………………………………..35
2.8 Расчет трансформаторов…………………………………………………37
2.9 Расчет усилителя-ограничителя…………………………………………40
2.10 Расчет фильтров…………………………………………………………41
2.11 Расчет детектора………………………………………………………...41
2.12 Расчет измерителя частоты……………………………………………..40
Заключение………………………………………………………………………43
Перечень ссылок………………………………………………………………...44
Приложение А…………………………………………………………………...47
Приложение Б Перечень элементов……………………………………………50
Приложение Б
Перечень элементов
ВВЕДЕНИЕ
Разделенные сигналы поступают на фильтры, идентичные фильтрам, стоящим на входе, которые отсеивают паразитные частоты. Очищенные сигналы поступают на демодулятор, который выделяет первичную функцию из поступивших сигналов.
После демодуляции сигналы поступают на преобразователь постоянного напряжения в переменное, откуда сигнал поступает на выходные приборы.
1 АНАЛИТИЧЕСКИЙ ОБЗОР
Телемеханика изучает процессы и методы автоматической передачи на расстояние команд управления и сообщений о состоянии объектов.
Телемеханика применяется в первую очередь в тех областях, где необходимо объединить территориально разобщенные объекты в единый производственный комплекс с централизованным управлением. Такие задачи возникают в энергосистемах, транспорте, на крупных заводах и т.д.
Внедрение телемеханики повышает производительность труда, снижает себестоимость продукции, повышает оперативность и надежность управления, резко снижает вероятность аварии и возможность перебоев в работе.
Если команды с помощью специальных устройств передаются из пункта управления (ПУ) или с диспетчерского пункта (ДП) к находящимся на расстоянии объектам принято говорить о телеуправлении (ТУ), если сообщения о состоянии объекта передаются в обратном направлении о телесигнализации и телеизмерении (ТС и ТИ).
Система телемеханики состоит из устройств телемеханики и каналов связи и предназначается для управления на расстоянии производственными и другими объектами. Она выполняет функции автоматической передачи через канал связи команд от оператора или от управляющих устройств к объектам управления и сообщений о состоянии объектов в обратном направлении.
Системы телемеханики совместно со средствами автоматики позволяют осуществить управление на расстоянии машинами и установками без дежурного персонала на местных объектах и объединить их в единые производственные комплексы с централизованным управлением.
К простейшим по структуре системам телемеханики относится система управления на расстоянии отдельным самолетом, кораблем, строительным краном, электростанцией, атомным реактором. Для таких случаев характерно сосредоточение в одном месте на контролируемом пункте (КП) всех объектов, которые контролируются на расстоянии из пункта управления.
Для контроля состояния объектов управления передается информация телесигнализации или телеизмерения. При телесигнализации обычно передается информация типа да- нет об одном из двух состояний или значений величины соответствующей изменению состояния объектов (включено или выключено, открыто или закрыто и т.д.)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.