![]() , раніше
підібраний насос повністю задовольняє потреби.
, раніше
підібраний насос повністю задовольняє потреби.
8.  Тепловий розрахунок
Тепловий розрахунок
Розрахунок потужності і КПД гідроприводу
Вхідна потужність гідроприводу:
 (Вт);
(Вт);
![]()
 ;
;
Вибираємо асинхронний електродвигун типу 4А132S4У3 потужністю 7,5кВт.
Загальний КПД гідропривода:
Тепловий розрахунок
Розрахункова площа поверхні гідро бака:
![]() , де
, де ![]() ;
;
Кількість тепла, отримана рідиною за одиницю часу:
![]() = (1-0,64)*2,571*0,7=0,647 кДж/с
= (1-0,64)*2,571*0,7=0,647 кДж/с
Кп - коефіцієнт роботи гідро привода під навантаженням.
Максимальна температура робочої рідини, після години роботи гідро привода:
 =75,2
=75,2![]()
tвозд - температура навколишнього середовища.
 k - коефіцієнт
теплопередачі від гідро бака до навколишнього середовища
k - коефіцієнт
теплопередачі від гідро бака до навколишнього середовища
Оскільки, температура
перебільшує максимально допустиму величину 70![]() , то
потрібно передбачити теплообмінник.
, то
потрібно передбачити теплообмінник.
Зважаючи на простоту та дешевизну вибираємо повітряний теплообмінник.
Так як нам потрібно розсіювати 0,647кВт енергії вибираємо стандартний теплообмінник
Теплообмінник Г44-23
- номінальна витрата Qн=35 л/хв.;
- розсіяна потужність 1,63 кВт;
- умовний прохід К1/2’’;
- маса m= 31 кг.
Таким чином завдяки
теплообмінника можливо регулювати температуру в діапазоні до 40![]() .
.
Використовуємо термометр
ТКП-60/3Н ТУ 311-00225621.166-96:
- Діапазон температур t=-25Ġ+75 °c;
9.
 Математична модель
Математична модель
Одним з ефективних методів з’ясування поведінки моделі є математична модель. Вона дозволяє аналітично з’ясувати поведінку привода в різних умовах.
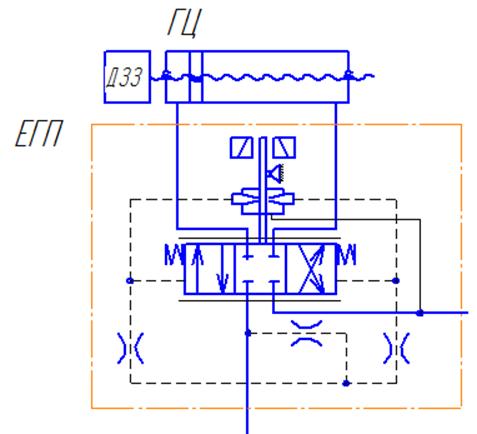
Рис. 13. Схема САР.
Опис системи:
- Вихідний орган гідроциліндр (ГЦ);
- Керуючий орган електрогідравлічний підсилювач (ЕГП):
- електромеханічний перетворювач;
- підсилювач типу сопло-заслінка;
- чотирьох щілинний золотник;
- Датчик зворотного зв’язку (ДЗЗ).
Побудуємо функціональну схему.
СП – сумуючий пристрій;
П – підсилювач;
 ЕМП
– електромеханічний перетворювач;
ЕМП
– електромеханічний перетворювач;
ГП – гідро підсилювач типу сопло-заслінка;
ГВП – гідравлічний виконавчий пристрій;
ДЗЗ – датчик зворотного зв’язку (охоплює весь привід).
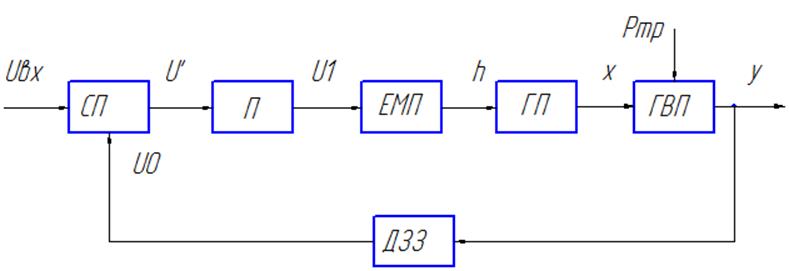
Рис. 14. Функціональна схема.
Uвх – вхідна керуюча напруга;
h – переміщення заслінки;
х – переміщення золотника;
Ртр – зовнішнє збурення сила тертя.
Аналіз рівнянь САР та запис їх в «нормальному» вигляді. Знаходження коефіцієнтів.
Підсилювач Ку=120.
Потенціометр Кп=600 в/м.
Електромеханічний перетворювач

Де
: ![]() м/в;
м/в;
![]() с;
с;
ξ=0.4.
 Сопло-заслонка
Сопло-заслонка
Тек
як![]() , тоді:.
, тоді:.
Розв’язуємо систему рівнянь
![]() ;
;
Приведемо систему до нормального вигляду
![]() ;
;
Вводимо
оператор Лапласа: ![]() – S.
– S.
![]() ;
;
 ;
;
Визначимо коефіцієнти:


X(![]() )=
)=![]() .
.
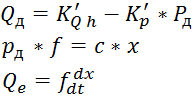
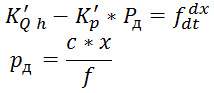
Гідроциліндр, керований чотирьох щілинним розподільником:
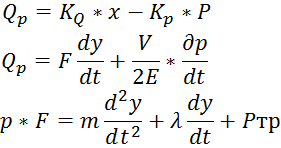
 Прирівнюємо рівняння:
Прирівнюємо рівняння:
![]() ;
;
Знайдемо Р та підставимо в попереднє:
![]() ;
;

Розіб’ємо окремо вхідні та вихідні величини:


Приведемо рівняння до нормального вигляду, переносимо вихідні величини вліво, а вхідні та збурю вальну величину вправо та перетворимо так, щоб при регульованій величині У коефіцієнт був рівний 1.

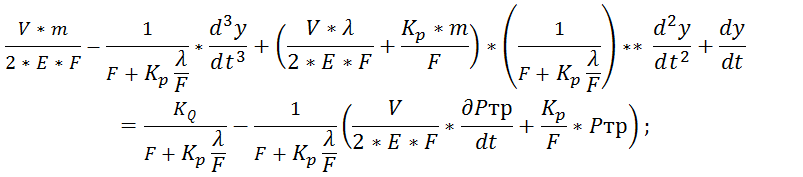
 |
Визначаємо сталу часу:
 ;
;
![]()
 ;
;
 =
= =285;
=285;
 =
= =
=![]() ;
;
 ;
;
Записуємо рівняння в канонічному вигляді:
![]() 285
285![]() ;
;
Вводимо оператор Лапласа:
![]() 285
285![]() ;
;
Визначаємо передаточні функції елементів.
- Передатна функція підсилювача
 ;
;
- Передатна функція ЕМП:
 ;
;
 - Передатна функція ГП сопло-заслінка:
- Передатна функція ГП сопло-заслінка:
 ;
;
- Передатна функція ГВП:
по керуючому впливу:
 ;
;
- від збурюю чого впливу:
 ;
;
- Передатна функція обертового трансформатора (ДЗЗ):
![]() ;
;
Визначаємо передатні функції розімкнутої та замкнутої системи.
- Передатна функція розімкнутої системи від керуючого впливу:
 ;
;
Від збурюючого впливу:
 ;
;
- Передатна функція замкнутої системи від керуючого впливу:
 ;
;
Від збурюючого впливу:
 ;
;
- Визначаємо критерії якості:
![]() ;
;
 Дана
передатна функція складається з: інтегруючої ланки
Дана
передатна функція складається з: інтегруючої ланки
![]()
Коливальних ланок

Визначаємо частоту злому![]()

Визначаємо частоту злому![]()
Аперіодичної ланки
Визначаємо
частоту злому![]()
![]()
Як видно – система стійка.
Похибка:
- по положенню ![]()
- по швидкості ![]() (≈0,05мм/с) ;
(≈0,05мм/с) ;
- по прискоренню ![]()
Швидкодія :![]()
10.
 Технологія виготовлення
Технологія виготовлення
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.