6 ЛАБОРАТОРНАЯ РАБОТА № 6. ПОВЫШЕНИЕ КАЧЕСТВА РЕГУЛИРОВАНИЯ ЛИНЕЙНЫХ САУ
6.1 Цель работы
Исследовать влияние структуры и параметров настройки регулятора на качество переходных процессов в замкнутых системах.
6.2 Краткие теоретические сведения
Повышение запаса устойчивости и быстродействия систем автоматического управления достигается введением в нее специальных корректирующих устройств и рациональным выбором параметров этих устройств. Выбор передаточной функции корректирующего устройства, обеспечивающего достижение требуемых показателей, является задачей синтеза САУ. При этом исходят из того, что объект регулирования (неизменная часть системы) задан, а синтезу подлежит корректирующее устройство (регулятор).
В первой части лабораторной работы исследуются различные типы регуляторов (П, ПИ, ПД, ПИД) при неизменном коэффициенте усиления регулятора Кр.
Во второй части работы исследуются те же регуляторы, но при другом, увеличенном значении коэффициента усиления Кр.
Изменение
коэффициента  регулятора У осуществляется
вращением ручки «Uвх», при этом изменяется сопротивление резистора Rу=R5,
что приводит к изменению постоянной времени
регулятора У осуществляется
вращением ручки «Uвх», при этом изменяется сопротивление резистора Rу=R5,
что приводит к изменению постоянной времени ![]() .
.
6.3 Методические указания к выполнению работы
6.3.1 Нажать кнопку переключателя «S5».
6.3.2
Установить коэффициент усиления регулятора  .
Для этого необходимо измерить вольтметром значения входного U1 и
выходного U2 сигналов регулятора У при его работе в режиме П –
регулятора.
.
Для этого необходимо измерить вольтметром значения входного U1 и
выходного U2 сигналов регулятора У при его работе в режиме П –
регулятора.
6.3.2.1 Нажать кнопку переключателя «S2» и отжать кнопку переключателя «S1».
6.3.2.2 Подать от генератора Е1 на вход регулятора У (гнездо Х9) сигнал напряжением U1 = 1B любой полярности.
6.3.2.3 Вращением ручки «Uвх» добиться необходимого значения выходного сигнала U2 = 1В (гнездо Х11) с полярностью противоположной входной.
6.3.2.4 Полученное значение Кр занести в таблицу 6.1.
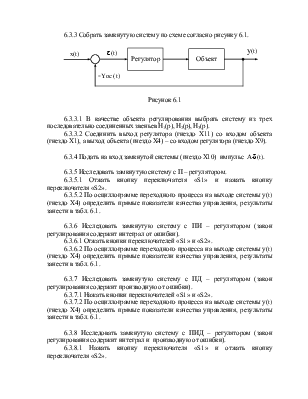
6.3.3 Собрать замкнутую систему по схеме согласно рисунку 6.1.
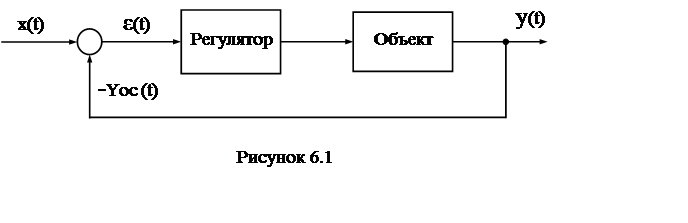 |
6.3.3.1 В качестве объекта регулирования выбрать систему из трех последовательно соединенных звеньев Н1(р), Н2(р), Н3(р).
6.3.3.2 Соединить выход регулятора (гнездо Х11) со входом объекта (гнездо Х1), а выход объекта (гнездо Х4) – со входом регулятора (гнездо Х9).
6.3.4 Подать на вход замкнутой системы (гнездо Х10) импульс А×d(t).
6.3.5 Исследовать замкнутую систему с П – регулятором.
6.3.5.1 Отжать кнопку переключателя «S1» и нажать кнопку переключателя «S2».
6.3.5.2 По осциллограмме переходного процесса на выходе системы у(t) (гнездо Х4) определить прямые показатели качества управления, результаты занести в табл. 6.1.
6.3.6 Исследовать замкнутую систему с ПИ – регулятором (закон регулирования содержит интеграл от ошибки).
6.3.6.1 Отжать кнопки переключателей «S1» и «S2».
6.3.6.2 По осциллограмме переходного процесса на выходе системы у(t) (гнездо Х4) определить прямые показатели качества управления, результаты занести в табл. 6.1.
6.3.7 Исследовать замкнутую систему с ПД – регулятором (закон регулирования содержит производную от ошибки).
6.3.7.1 Нажать кнопки переключателей «S1» и «S2».
6.3.7.2 По осциллограмме переходного процесса на выходе системы у(t) (гнездо Х4) определить прямые показатели качества управления, результаты занести в табл. 6.1.
6.3.8 Исследовать замкнутую систему с ПИД – регулятором (закон регулирования содержит интеграл и производную от ошибки).
6.3.8.1 Нажать кнопку переключателя «S1» и отжать кнопку переключателя «S2».
6.3.8.2 По осциллограмме переходного процесса на выходе системы у(t) (гнездо Х4) определить прямые показатели качества управления, результаты занести в табл. 6.1.
6.3.9 Подать на вход замкнутой системы (гнездо Х10) ступенчатое воздействие А×1(t).
6.3.10 Выполнить п.п. 6.3.5 – 6.3.8.
6.3.11 Разомкнуть систему регулирования.
6.3.12 Установить коэффициент усиления регулятора Кр = U2/U1 = 2.
6.3.12.1 Отжать кнопку переключателя «S1» и нажать кнопку переключателя «S2».
6.3.12.2 Подать от генератора Е1 на вход регулятора У (гнездо Х9) сигнал напряжением U1 = 1B любой полярности.
6.3.12.3 Вращением ручки «Uвх» добиться необходимого значения выходного сигнала U2 = 2B (гнездо Х11) противоположной полярности.
6.3.12.4 Полученное значения Кр занести в таблицу 6.1.
6.3.13 Выполнить п.6.3.3.
6.3.14 Исследовать замкнутую систему управления с увеличенным коэффициентом усиления регулятора.
6.3.14.1 Выполнить пп. 6.3.4 – 6.3.10.
6.4 Обработка результатов
6.4.1 Сравнить экспериментальные и расчетные показатели качества соответствующих схем. Для П и ПД – регуляторов при оценке tп и s использовать корневые косвенные показатели качества регулирования m и h. Для ПИ и ПИД – регуляторов при оценке tп и s использовать частотные косвенные показатели:
- для ПИ – регулятора Dj и DА, определяемые по КФЧХ;
- для ПИД – регулятора Dj и DL, определяемые по ЛАЧХ и ЛФЧХ.
6.4.2 Сделать вывод о влиянии коэффициента усиления регулятора, введения производной и интеграла от ошибки на качество регулирования.
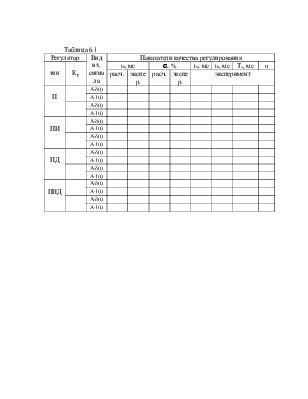
Таблица 6.1
|
Регулятор |
Вид вх. сигнала |
Показатели качества регулирования |
||||||||
|
тип |
Кр |
tп, мс |
s, % |
tм, мс |
tн, мс |
Тз, мс |
n |
|||
|
расч. |
экспер. |
расч. |
экспер. |
эксперимент |
||||||
|
П |
А×d(t) |
|||||||||
|
A×1(t) |
||||||||||
|
А×d(t) |
||||||||||
|
A×1(t) |
||||||||||
|
ПИ |
А×d(t) |
|||||||||
|
A×1(t) |
||||||||||
|
А×d(t) |
||||||||||
|
A×1(t) |
||||||||||
|
ПД |
А×d(t) |
|||||||||
|
A×1(t) |
||||||||||
|
А×d(t) |
||||||||||
|
A×1(t) |
||||||||||
|
ПИД |
А×d(t) |
|||||||||
|
A×1(t) |
||||||||||
|
А×d(t) |
||||||||||
|
A×1(t) |
||||||||||
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.