


МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
ДОНБАССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАФЕДРА АУТП
ОТЧЕТ
по лабораторной работе 1
Исследование дискретной системы управления
По курсу «Цифровые системы управления»
Выполнила: ст.гр. АКГ-09
Суховиенко Д.С
Принял: доц. кафедры
Литвинов
Алчевск, 2011
ВВЕДЕНИЕ
Целью данной работы является знакомство с работой дискретных систем, определение показателей качества.
1 ТЕОРЕТИЧЕСКИЕ ИССЛЕДОВАНИЯ
1.1 Задания к лабораторной работе
Используя пакет Simulink системы MATLAB исследовать работу импульсных элементов - экстраполятора нулевого и первого порядков. В качестве тестового входного сигнала принять синусоидальный сигнал единичной амплитуды частотой ω0 = 1 рад/c. Получить графики входного, выходного сигналов и сигнала ошибки квантования при различных периодах дискретизации.
Осуществить моделирование непрерывной системы управления и определить показатели качества переходного процесса при единичном скачкообразном задающем воздействии. Учесть, что время интегрирования должно быть больше времени достижения первого максимума после начала переходного процесса, т.е. больше 4.6Tμ и меньше 10Tμ .Параметры объекта управления К0 =30, Т1=0,7 с, Т2=0,07 с.
Осуществить моделирование импульсной системы управления с экстраполятором нулевого порядка, установленным на выходе регулятора, и определить показатели качества переходного процесса при периодах квантования Tk = 0.1/ ωс, Tk = 0.25/ωс, Tk = 0.5/ωс, Tk = 1/ ωс. Параметры объекта управления такие же, как и в предыдущем задании.
Осуществить моделирование импульсной системы управления с экстраполятором первого порядка, установленным на выходе регуляторе, определить показатели качества переходного процесса. Параметры объекта управления и периоды квантования такие же, как и в предыдущем задании.
1.2 Подготовка к выполнению лабораторной работы
1.2.1 Исследование работы импульсных элементов – экстраполятора нулевого и первого порядка
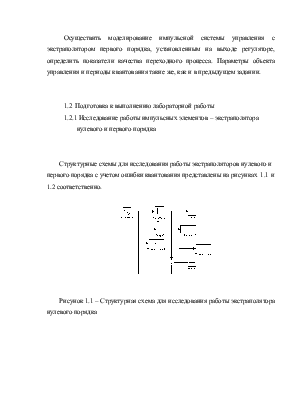
Структурные схемы для исследования работы экстраполяторов нулевого и первого порядка с учетом ошибки квантования представлены на рисунках 1.1 и 1.2 соответственно.
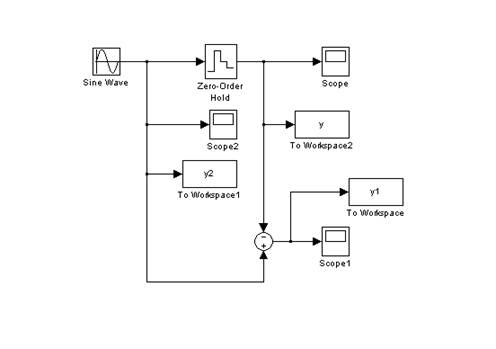
Рисунок 1.1 – Структурная схема для исследования работы экстраполятора нулевого порядка
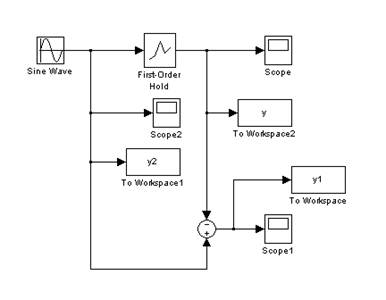
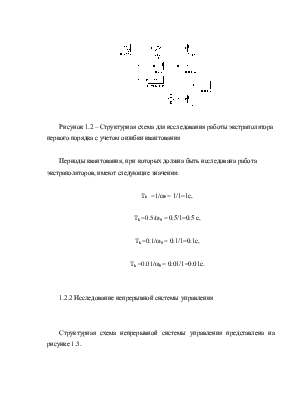
Рисунок 1.2 – Структурная схема для исследования работы экстраполятора первого порядка с учетом ошибки квантования
Периоды квантования, при которых должна быть исследована работа экстраполяторов, имеют следующие значения:
Tk =1/ω0 = 1/1=1с,
Tk =0.5/ω0 = 0.5/1=0.5 с,
Tk =0.1/ω0 = 0.1/1=0.1с,
Tk =0.01/ω0 = 0.01/1=0.01с.
1.2.2 Исследование непрерывной системы управления
Структурная схема непрерывной системы управления представлена на рисунке 1.3.
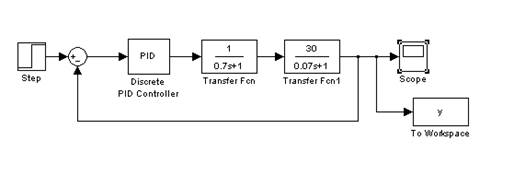
Рисунок 1.3 - Структурная схема непрерывной системы управления
Система управления состоит из объекта второго порядка и пропорционально интегрального регулятора.
Передаточная функция объекта управления
Передаточная функция пропорционально - интегрального регулятора
![]() .
.
Коэффициенты пропорциональной ![]() и интегральной
и интегральной ![]() частей регулятора
частей регулятора
рассчитываются по формулам
где ![]()
1.2.3 Исследование импульсной системы управления с экстраполятором нулевого порядка
Структурная схема импульсной системы управления с экстраполятором нулевого порядка представлена на рисунке 2.4.
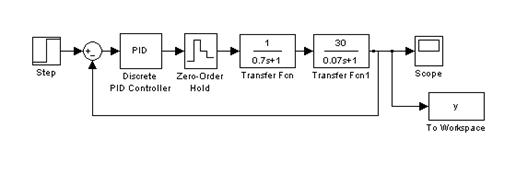
Рисунок 1.4 – Структурная схема дискретной системы управления с экстраполятором нулевого порядка
Частота среза замкнутой системы определяется выражением
 .
.
Исследование системы управления производится при следующих периодах дискретизации
Tk =0,1/![]() = 0,1/14=0,007с,
= 0,1/14=0,007с,
Tk =0.25/![]() = 0.25/14=0.02 с,
= 0.25/14=0.02 с,
Tk =0.5/![]() = 0.5/14=0.04с,
= 0.5/14=0.04с,
Tk =1/![]() = 1/14=0.07с.
= 1/14=0.07с.
1.2.4 Исследование импульсной системы управления с экстраполятором первого порядка
Структурная схема импульсной системы управления с экстраполятором первого порядка представлена на рисунке 1.5.
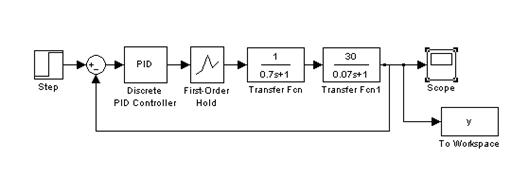
Рисунок 1.5 – Структурная схема дискретной системы управления с
экстраполятором первого порядка
Частота среза замкнутой системы определяется выражением
Исследование системы управления производится при следующих периодах дискретизации
Tk =0,1/![]() = 0,1/14=0,007с,
= 0,1/14=0,007с,
Tk =0.25/![]() = 0.25/14=0.02 с,
= 0.25/14=0.02 с,
Tk =0.5/![]() = 0.5/14=0.04с,
= 0.5/14=0.04с,
Tk =1/![]() = 1/14=0.07с.
= 1/14=0.07с.
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.