Из выражения (1.6) видно, что тяговое усилие является нелинейной функцией входного перемещения и при постоянных значениях остальных величин обратно пропорционально частоте тока.
Для компенсации тягового усилия якорь датчика часто укрепляют на пластинчатой пружине с жёсткостью:
 (1.7)
(1.7)
Однако вследствие
нелинейности тяговой характеристики полная компенсация тягового усилия возможна
лишь при ![]() . Большое
входное усилие является недостатком однотактного датчика. Другой недостаток
состоит в том, что статическая характеристика датчика не начинается от нуля.
. Большое
входное усилие является недостатком однотактного датчика. Другой недостаток
состоит в том, что статическая характеристика датчика не начинается от нуля.
Эти недостатки значительно меньше у двухтактного датчика. включенного по дифференциальной схеме (рисунок 3). Дифференциальная схема включения любого двухтактного датчика в общем случае является мостовой схемой с той лишь разницей, что нагрузка имеет среднюю точку, соединенную с источником тока. выходное напряжение измеряется между крайними клеммами нагрузки. Нагрузкой со средней точкой являются, например, входы двухтактного электронного усилителя, электродвигателя и электромашинного усилителя с двумя обмотками возбуждения.
Если поменять местами клеммы Е и Uвых, то нагрузка будет включена без средней точки, а сопротивления rН, станут балластными.
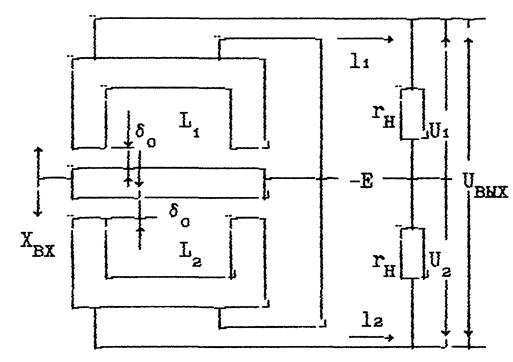
Рисунок 3 – Дифференциальная схема двухтактного датчика
Такая схема называется мостовой. Мостовые схемы менее экономичны, чем дифференциальные, из-за потери мощности в балластных сопротивлениях и применяются для маломощных датчиков, например емкостных.
Двухтактный датчик, включенный по дифференциальной схеме, имеет две независимые идентичные электрические цепи. Выходное напряжение равно разности напряжений на двух половинах сопротивления нагрузки Uвых=U1-U2. Входное перемещение Хвх отсчитывается от среднего положения якоря между двумя ярмами например, положительное – вниз. Отрицательное – вверх, на якорь действует сила, равная разности сил притяжения его со стороны каждого ярма. Эта сила равна нулю при Хвх=0. Для значений Хвх, близких к нулю, силу, действующую на якорь, можно скомпенсировать установкой якоря на пружине с определенной жесткостью.
Характеристика
двухтактного датчика геометрически (с учетом сдвига фаз) складывается из характеристик
обоих составляющих его однотактных датчиков (рисунок 3). Характеристика U2=U2(Xвх)
является зеркальным отражением характеристики U1=U1(Xвх)
относительно оси ординат вследствие симметрии схемы. Кривая – U2(Xвх)
– зеркальное отражение характеристики U2(Xвх)
относительно оси абсцисс. Сложив алгебраические ординаты кривых U1(Xвх)
и U2(Xвх) получим приближённую (без учёта сдвига
угла сдвига фаз ![]() ) статическую
характеристику UВЫХ=UВЫХ(XВХ) двухтактного датчика. Из кривых на рисунке 3
видно, что результирующая характеристика двухтактного датчика более линейна,
чем характеристика датчиков его составляющих.
) статическую
характеристику UВЫХ=UВЫХ(XВХ) двухтактного датчика. Из кривых на рисунке 3
видно, что результирующая характеристика двухтактного датчика более линейна,
чем характеристика датчиков его составляющих.
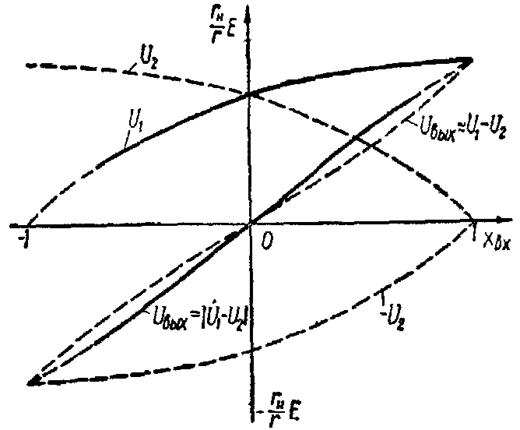
Рисунок 4 – Построение статической характеристики двухтактного индуктивного датчика при β = 1
Двухтактный датчик имеет наибольшую чувствительность в области значений Хвх, близких к нулю. При переходе значения входного перемещения через нуль фаза напряжения на выходе изменяется на 180°, что соответствует на статической характеристике условному изменению знака действующего напряжения Uвых.
Рассмотрим аналитическое
выражение статической характеристики двухтактного индукционного датчика. Если
для первого такта выходное напряжение определяется уравнением (1.2), то для
второго, в этом уравнении нужно изменить знаки перед ![]() ,тогда
получим:
,тогда
получим:

или
 (1.8)
(1.8)
откуда модуль Uвых
 (1.9)
(1.9)
Из выражения (1.9) видно,
что зависимость Uвых от ![]() вх нелинейная. Чем меньше β
т.е. чем меньше индуктивное сопротивление wL по сравнению с активным r,
тем сильнее отличается статическая характеристика двухтактного датчика от
прямой линии.
вх нелинейная. Чем меньше β
т.е. чем меньше индуктивное сопротивление wL по сравнению с активным r,
тем сильнее отличается статическая характеристика двухтактного датчика от
прямой линии.
При расчётах систем
автоматического регулирования целесообразно знать величину чувствительности
двухтактного датчика в области близкой к ![]() вх= 0. Из выражения
(1.9) можно получить выражение для относительной чувствительности датчика:
вх= 0. Из выражения
(1.9) можно получить выражение для относительной чувствительности датчика:

При ![]() вх=0
вх=0
 (1.10)
(1.10)
Приравняв ![]() нулю, найдём оптимальное значение β,
при котором относительная чувствительность максимальна. Когда активное
сопротивление цепи одного датчика равно его индуктивному сопротивлению при
нулю, найдём оптимальное значение β,
при котором относительная чувствительность максимальна. Когда активное
сопротивление цепи одного датчика равно его индуктивному сопротивлению при ![]() вх=0 βопт=1.
При этом получаем
вх=0 βопт=1.
При этом получаем
или
 (1.11)
(1.11)
Результирующее тяговое усилие согласно уравнению (1.6)
![]()

После преобразования получаем:
 (1.12)
(1.12)
Из этого выражения легко определить значение жесткости компенсирующей пружины
 (1.13)
(1.13)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.