|
лачка в направлении ω1 до контакта точки b
с толкателем она займет положение
Координата нижнего положения толкателя Текущий радиус-вектор |
Величины
Si,
соответствующие углам поворота кулачка φi,
берут из диаграммы ![]() или рассчитывают по аналитической
зависимости
или рассчитывают по аналитической
зависимости ![]() . Последовательно рассчитывают координату S0, текущие
радиусы-векторы ri, углы δi, δ0
и углы профиля αi. Табличная функция
. Последовательно рассчитывают координату S0, текущие
радиусы-векторы ri, углы δi, δ0
и углы профиля αi. Табличная функция ![]() определяет
центровой профиль кулачка.
определяет
центровой профиль кулачка.
В центральном (е = 0) кулачковом механизме с поступательно движущимся толкателем профильные αi и фазовые φi углы совпадают, так как Δi = δi – δ0 = 0, ri = r0 + si.
При вращающемся толкателе (рис. 12.8) теоретические выкладки аналогичны.
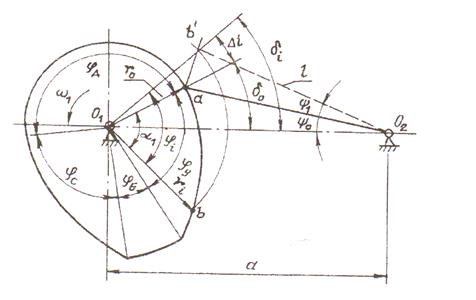
Рис. 12. 8. Схема к определению радиусов-векторов кулачково-коромыслового механизма
Точку ![]() находят на пересечении дуг радиусов riи l (длина коромысла). Для профилирования кулачка вначале
по заданному закону движения рассчитывают углы поворота коромысла ψiв
функции угла поворота кулачка. Затем для ряда последовательных значений φi, вычисляют радиус-вектор (из
находят на пересечении дуг радиусов riи l (длина коромысла). Для профилирования кулачка вначале
по заданному закону движения рассчитывают углы поворота коромысла ψiв
функции угла поворота кулачка. Затем для ряда последовательных значений φi, вычисляют радиус-вектор (из ![]() по
теореме косинусов):
по
теореме косинусов):
|
|
(12.13) |
где а — межосевое расстояние; ψ0 - начальный угол.
По теореме синусов находят углы:
|
|
(12.14) |
|
|
(12.15) |
В заключении определяют профильные углы αiпо формуле (12.8). В результате получают значения ri и αi, соответствующими одному и тому же углу поворота кулачка φi, которые заносят в таблицу. Минимальный радиус кулачка определяют по формуле (12.13) .при ψi = 0:
|
|
(12.16) |
Порядок выполнения работы
1. Записать исходные данные по варианту, заданному преподавателем (табл. 12.1).
|
Параметры |
Номер варианта |
|||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
закон движения |
треуг |
прям |
синус |
косин |
треуг |
прям |
синус |
косин |
треуг |
прям |
|
вид механизма |
кором |
поступ |
кором |
поступ |
кором |
поступ |
кором |
поступ |
кором |
поступ |
|
φу, град |
168 |
60 |
156 |
72 |
144 |
84 |
132 |
96 |
120 |
108 |
|
φд, град |
12 |
120 |
24 |
108 |
36 |
96 |
48 |
84 |
60 |
72 |
|
φс, град |
168 |
60 |
156 |
72 |
144 |
84 |
132 |
96 |
120 |
108 |
|
φб, град |
12 |
120 |
24 |
108 |
36 |
96 |
48 |
84 |
60 |
72 |
|
Smax, мм |
- |
16 |
- |
20 |
- |
24 |
- |
26 |
- |
30 |
|
ψmax, град |
15 |
- |
18 |
- |
22 |
- |
25 |
- |
28 |
- |
|
l, мм |
80 |
- |
90 |
- |
100 |
- |
110 |
- |
120 |
- |
|
|
45 |
30 |
45 |
30 |
45 |
30 |
45 |
30 |
45 |
30 |
|
e, мм |
- |
0 |
- |
5 |
- |
10 |
- |
15 |
- |
20 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.