Исходя из выбранной компоновочной
схемы, число цилиндров ![]() , двигатель
одноблочный (4 цилиндра в ряд). По условию равенства интервалов между
вспышками в цилиндрах двигателя угол между кривошипами его коленчатого вала
определяется из выражения:
, двигатель
одноблочный (4 цилиндра в ряд). По условию равенства интервалов между
вспышками в цилиндрах двигателя угол между кривошипами его коленчатого вала
определяется из выражения:![]() .
Так как проектируемый двигатель имеет четное число цилиндров и является
четырехтактным, то принимаем равномерно - продольно -симметричную схему
заклинки кривошипов коленчатого вала (РПСС). Это обусловлено стремлением
самоуравновесить двигатель по наибольшему числу признаков.
.
Так как проектируемый двигатель имеет четное число цилиндров и является
четырехтактным, то принимаем равномерно - продольно -симметричную схему
заклинки кривошипов коленчатого вала (РПСС). Это обусловлено стремлением
самоуравновесить двигатель по наибольшему числу признаков.
Схема расположения кривошипов коленчатого вала двигателя представлена на
Рисунке 3.
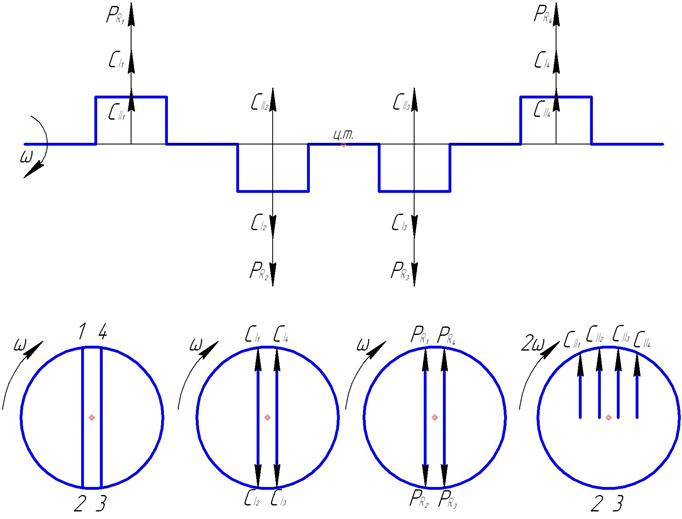
Рисунок 3 Схема заклинки кривошипов коленчатого вала и направление действия сил, действующих в КШМ..
Направление вращения вала, если наблюдать двигатель со стороны, противоположной отбору мощности, по часовой стрелке. Порядок работы цилиндров по блоку при выбранной схеме расположения кривошипов вала и известном направлении его вращения определяется по мере проворачивания схемы кривошипов вокруг оси коленчатого вала. При этом вспышки назначаются с приходом кривошипов в В.М.Т. цилиндров блока.
Назначим следующий порядок работы цилиндров двигателя:
|
1 |
180 |
3 |
180 |
4 |
180 |
2 |
180 |
1 |
Вспышки в цилиндрах двигателя происходят
через равные интервалы (![]() ), вследствие чего
выходной крутящий момент оказывается равномерным. График выходного крутящего
момента представлен в Приложении 3.
), вследствие чего
выходной крутящий момент оказывается равномерным. График выходного крутящего
момента представлен в Приложении 3.
Уравновешивание двигателя рассматривается только с учётом воздействия сил инерции возвратно-поступательно движущихся и вращающихся неуравновешенных масс (ПДМ и ВНМ) и продольных моментов этих сил, действующих в плоскостях, проходящих через ось коленчатого вала.
Каждая неуравновешенная вращающаяся масса mR развивает центробежную силу
PR = mR × R × w2, радиус-вектор которой направлен по радиусу соответственного кривошипа и вращается вместе с ним вокруг оси коленчатого вала с угловой скоростью w в плоскости осей цилиндров рассматриваемого отсека двигателя.
Каждая поступательно движущаяся масса развивает действующую вдоль оси соответственного цилиндра силу инерции, которая может быть определена в виде двух составляющих сил инерции первого и второго порядков:
![]()
где PI – силы инерции первого порядка;
PII – силы инерции второго порядка.
Шесть условий полной динамической самоуравновешенности двигателя – равенство нулю результирующих сил инерции и продольных моментов от этих сил:
Схемы расположения радиус векторов Pr центробежных сил НВМ, фиктивных радиус-векторов С1 сил первого порядка и С11 сил инерции второго порядка показаны на рисунке 3.
Из рисунка 3 видно, что двигатель уравновешен по пяти признакам:

Неуравновешенны силы инерции второго порядка. Результирующий фиктивный радиус-вектор второго порядка равен:
![]()
Он вращается вокруг оси коленчатого вала и приложен к центру тяжести его, лежащему в центре средней коренной шейки вала. Вектор результирующий силы второго порядка, реально действующий в двигателе, определяется как проекция результирующего фиктивного радиус-вектора второго порядка на плоскость осей цилиндров. При повороте первого кривошипа на угол a от ВМТ получаем:
![]()
Пример уравновешивания этой результирующей силы представлен на рисунке 4. Она изменяет свою величину и направление с угловой частотой 2w, действует вдоль осей цилиндров, приложена к средней коренной шейки вала и стремится то оторвать двигатель от опор, то прижать к нему.
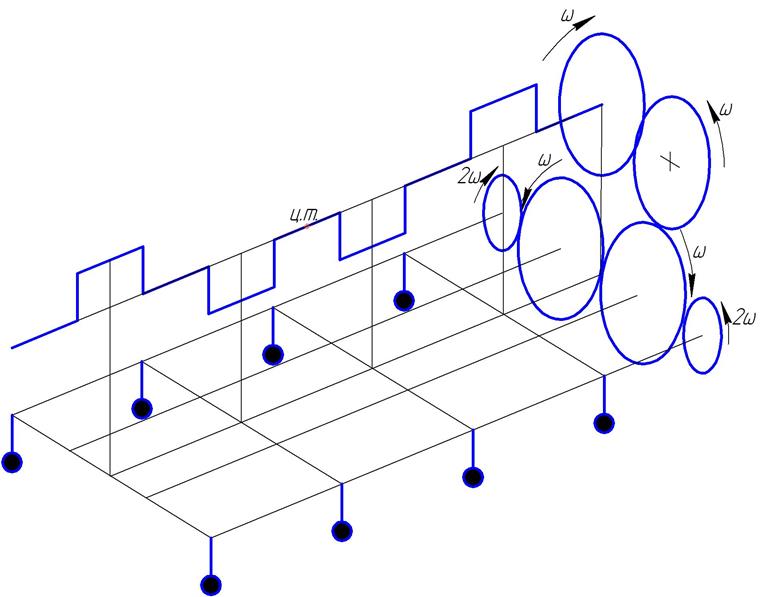
Рисунок 4 Уравновешивание суммарных сил инерции второго порядка.
В транспортном двигателе силу å PII можно оставить неуравновешенной, поскольку она не вызывает существенных вибраций двигателя.
Главная динамическая таблица заполняется для четырехтактного 4х-цилиндрового одноблочного двигателя. Порядок работы цилиндров в блоке:
1 – 3 – 4 – 2 – 1
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.