Санкт-Петербургский Государственный Политехнический Университет
Энергомашиностроительный факультет
Кафедра Двигатели внутреннего сгорания
Отчёт о лабораторной работе №2
Регулирование холостого хода
Выполнили:
Группа 5031/1
5031/2
Руководитель: Пономарёв А.С.
Санкт-Петербург
2011
1. Цель работы
Целью данной лабораторной работы является изучение зависимости работы регулятора холостого от изменения коэффициентов жесткости, сравнение скоростей выхода двигателя на номинальную частоту вращения на холостом ходу при нагружении двигателя, понимание алгоритма регулирования холостого хода.
2. Объект испытаний
Объектом испытаний является двигатель с искровым зажиганием Волжского автомобильного завода ВАЗ – 2112, на холостом ходу для изменения режима работы двигателя он дополнительно нагружается мощностью 150 вт.
3. Результаты испытаний
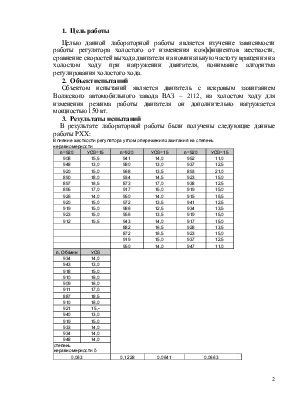
В результате лабораторной работы были получены следующие данные работы РХХ:
|
Влияние жесткости регулятора углом опережения зажигания на степень неравномерности |
|||||||||||||
|
n=920 |
УОЗ=15 |
n=920 |
УОЗ=15 |
n=920 |
УОЗ=15 |
||||||||
|
908 |
15,5 |
941 |
14,0 |
952 |
11,0 |
||||||||
|
948 |
13,0 |
980 |
13,0 |
937 |
12,5 |
||||||||
|
920 |
15,0 |
968 |
13,5 |
893 |
21,0 |
||||||||
|
890 |
18,0 |
934 |
14,5 |
923 |
15,0 |
||||||||
|
897 |
16,5 |
873 |
17,0 |
938 |
12,5 |
||||||||
|
895 |
17,0 |
917 |
15,0 |
919 |
15,0 |
||||||||
|
926 |
14,0 |
950 |
14,0 |
915 |
16,5 |
||||||||
|
920 |
15,0 |
972 |
13,5 |
941 |
12,5 |
||||||||
|
919 |
15,0 |
986 |
12,5 |
934 |
13,5 |
||||||||
|
923 |
15,0 |
956 |
13,5 |
919 |
15,0 |
||||||||
|
912 |
15,5 |
943 |
14,0 |
917 |
15,0 |
||||||||
|
882 |
16,5 |
928 |
13,5 |
||||||||||
|
872 |
16,5 |
923 |
15,0 |
||||||||||
|
919 |
15,0 |
937 |
12,5 |
||||||||||
|
950 |
14,0 |
947 |
11,0 |
||||||||||
|
n, Об/мин |
УОЗ |
||||||||||||
|
934 |
14,0 |
||||||||||||
|
943 |
13,0 |
||||||||||||
|
918 |
15,0 |
||||||||||||
|
910 |
16,0 |
||||||||||||
|
909 |
16,0 |
||||||||||||
|
911 |
17,0 |
||||||||||||
|
887 |
18,5 |
||||||||||||
|
910 |
16,0 |
||||||||||||
|
921 |
15,- |
||||||||||||
|
940 |
13,0 |
||||||||||||
|
919 |
15,0 |
||||||||||||
|
933 |
14,0 |
||||||||||||
|
934 |
14,0 |
||||||||||||
|
948 |
14,0 |
||||||||||||
|
степень неравномерности δ |
|||||||||||||
|
0,063 |
0,1228 |
0,0641 |
0,0663 |
||||||||||
Степень неравномерности регулятора считаем по формуле:
Выводы: Увеличение общей жесткости регулятора привело к уменьшению степени неравномерности, а следовательно и стабильности частоты вращения коленчатого вала при неизменной нагрузке на холостом ходу.
ПИД регулятор по расходу воздуха.
|
Пропорциональный коэффициент К1 = 0,001 |
|
|
Интегральный коэффициент К3 = 0,00498 |
|
|
Общий коэффициент жесткости = 0,3 |
|
Прхх= Прхх(tож) + Ко[К1(nххзад – nхх) – К2dn/dt + К3⋅S(N)]
где: К1 – пропорциональный коэффициент;
К2 – дифференциальный коэффициент;
К3 – интегральный коэффициент;
Ко – общий коэффициент жесткости.
Результаты испытаний для измененной общей жесткости регулятора:
Log5:
|
К0 = 0,30, |
Кп= 0,00156 |
Ки = 0,00498 |
|
t |
n |
рхx |
|
23”08,34 |
947 |
44 |
|
23”08,51 |
916 |
44 |
|
23”08,75 |
819 |
45 |
|
23”15,87 |
912 |
45 |
Log6:
|
Ки = 0,00498, |
Кп= 0,00313 |
|
|
t |
n |
рхx |
|
26”28,31 |
916 |
44 |
|
26”28,60 |
829 |
44 |
|
26”34,00 |
910 |
44 |
Log7:
|
Ки = 0,00498, |
Кп= 0,00313 |
|
|
t |
n |
рхx |
|
31”29,7 |
923 |
43 |
|
31”30,48 |
814 |
47 |
|
31”34,17 |
922 |
45 |
Log8:
|
К0 = 0,8, |
Кп= 0,006 |
Ки = 0,008 |
|
t |
n |
рхx |
|
33”04,14 |
915 |
43 |
|
33”04,34 |
884 |
44 |
|
33”04,54 |
856 |
45 |
|
33”07,00 |
919 |
45 |
В результате в качестве оптимального варианта был выбран последний, так как в нем время уменьшилось с 7 секунд до 3-х, но степень неравномерности осталась прежней.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.