
Статическая характеристика
гидроусилителя, т.е. зависимость x(s), в равновесных положениях поршня
графически изображается вертикальной прямой, так как поршень может быть
неподвижен только при единственном положении золотника, когда подводящий
канал управляющей полости закрыт пояском золотника.
Выведем уравнение
движения поршня гидроусилителя. При выводе этого уравнения (рис. 54, а)
обычно пренебрегают влиянием инерции масс и сопротивлением в подводящих и
отводящих трубопроводах. Перестановочная сила Р принимается постоянной.
Для гидроусилителя обычного типа с двумя управляемыми полостями, с
прямоугольными окнами шириной b во втулке и при отсутствии перекрыш у
золотника уравнение движения определяется из 
условий откуда
Введя обозначения ξ =(x-x0)/xн и σ = s /sн, получим Ts(dξ/dt)=
σ, где Ts - время гидроусилителя:
В преобразованном по Лапласу
виде уравнение движения поршня гидроусилителя имеет вид Ts рξ(р)=
σ(р) и передаточная функция W(p) = 1/Ts р- интегрирующее звено.
В таком регуляторе (см.
схему на рис. 55) золотник гидроусилителя 2 связан непосредственно с
муфтой измерителя скорости 1. Шток поршня 3 перемещает рейку
топливного насоса. В частности, при уменьшении нагрузки на двигатель
возникающая разность моментов двигателя и сопротивления вызывает ускорение вала
двигателя. Увеличение частоты вращения повышает центробежную силу грузов
измерителя скорости, которая, превышая восстанавливающую силу пружины, вызывает
радиальное перемещение грузов и осевое движение муфты (в данном случае - влево). При этом золотник 
гидроусилителя, двигаясь вместе
с муфтой, открывает подвод жидкости в левую полость сервомотора. Поршень под
действием разности давлений смещается вправо вместе с рейкой топливного насоса,
уменьшая подачу топлива. Соответственно уменьшается крутящий момент двигателя,
и когда он сравнивается с моментом сопротивления, разгон двигателя
прекращается. 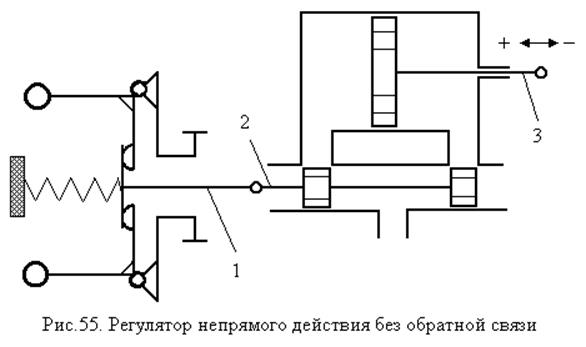
Дальнейшее уменьшение подачи
топлива приводит к тому, что разность моментов сопротивления и двигателя
вызывает уменьшение частоты вращения вала двигателя и связанного с ним измерителя
скорости. После выравнивания центробежной и восстанавливающей сил грузы
начинают сходиться, постепенно уменьшая подачу жидкости в левую полость, а
затем, после ее перекрытия золотником, открывают подвод в правую полость.
Направление движения рейки изменяется на противоположное. Процесс
заканчивается, когда восстанавливается исходная частота вращения и грузы
занимают положение, при котором оба канала гидроусилителя закрыты поясками
золотника. Таким образом, такая система регулирования скорости имеет
единственный равновесный режим и поддерживает строго постоянную частоту
вращения. Это подтверждается графиком на рис. 56, а, где zр
- положение муфты измерителя, при
котором золотник гидроусилителя перекрывает оба подводящих канала. Этому
положению муфты при постоянной величине восстанавливающей силы соответствует
единственная частота вращения ωр, при которой восстанав-ливающая и
центробежная силы уравновешены. Скоростная характеристика двигателя с такой
системой автоматического регулирования скорости показана на рис. 56, б.
Регуляторная ветвь представляет собой вертикальную прямую. Естественно, при
изменении затяжки пружины измерителя равновесная частота вращения будет
изменяться, но равновесное положение муфты остается неизменным.
Для анализа динамических
свойств данной системы регулирования скорости воспользуемся структурной схемой,
показанной на рис. 57. Здесь W0(p) = 1/Tap
- передаточная функция объекта
регулирования (без учета самовыравнивания), W1(p) = 1/(Tr2p2
+ Tkp + δr) - передаточная функция измерителя скорости, W2(p)
= 1/Tsp - передаточная функция гидроусилителя.

Передаточная функция системы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.