ВВЕДЕНИЕ
Современные системы автоматического управления нашли самое широкое применение в различных областях народного хозяйства. Это связано не только с необходимостью автоматизации различных технологических процессов и производственных операций, но и с появлением принципиально новых автоматизированных машин, предназначенных для работы в экстремальных условиях: в космосе, под водой, в зонах с ядерным излучением, в шахтах, в агрессивных средах и т.п.
Высокие требования, предъявляемые к динамическим характеристикам систем автоматического управления, обуславливают необходимость учитывать при их проектировании влияние зазоров и упругих деформаций, сухого и вязкого трения в силовом редукторе, переменность моментов инерции нагрузки, внешние возмущения и т.д. Это особенно важно для автоматических систем большой мощности и систем со многими степенями свободы.
Таким образом специфика объекта регулирования выдвигает ряд новых проблем при проектировании автоматических систем.
Из всего многообразия систем автоматического регулирования в данном курсе выделяется лишь класс следящих систем, при этом общие вопросы проектирования рассматриваются на конкретных примерах, что, не нарушая общности выводов, позволяет изложить инженерные методики проектирования современных, сложных по своей структуре, высококачественных следящих систем.
Проектирование современных систем автоматики немыслимо без применения цифровой и аналоговой техники. Этим вопросам в настоящем курсе также уделяется должное внимание. Важным этапом проектирования является синтез структурной схемы следящей системы, выбор и согласование необходимых элементов и их параметров, оценка статической и динамической точности системы, определение необходимости введения коррекции, расчет корректирующих устройств.
ГЛАВА I. КЛАССИФИКАЦИЯ И ВИДЫ СЛЕДЯЩИХ СИСТЕМ
1.1. Классификация следящих систем (СС)
Широкий диапазон применения, разнообразие функционального построения и математического описания следящих систем в значительной мере осложняют их классификацию. Трудности определения общего критерия классификации следящих систем неизбежно приводят к “многомерной” классификационной структуре. Следящие системы можно классифицировать по способу формирования управляющего воздействия, характеру сигнала рассогласования, способу математического описания СС и характеру контролируемых изменений, проходящих в следящих системах.
С позиций проектирования приведенные признаки классификации не являются достаточными, т.к. не учитывают особенностей следящих систем в зависимости от их назначения и условий работы, вида исполнительных устройств и принципа их действия.
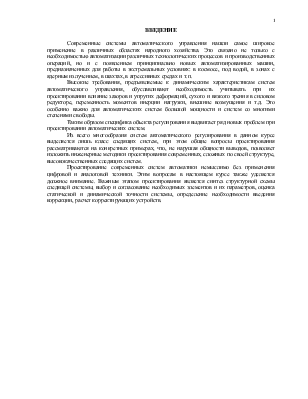
С учетом сказанного все многообразие СС модно классифицировать по основным признакам, связанным с принципами построения и действия, спецификой работы и т.д. (рис. 1.1).
Рис 1.1
Динамические свойства СС и законы изменения управляющих и возмущающих воздействий во многом зависят от назначения объекта управления в целом и функций, выполняемых СС, а также от условий работы.
По условиям работы СС подразделяются на наземные, корабельные, бортовые и промышленные. Наземные системы, в свою очередь, можно разделить на стационарные и подвижные. В сравнительно благоприятных условиях находятся наземные стационарные системы, которые, как правило, имеют стационарное питание, не имеют жестких ограничений по массе и габаритным размерам. В наиболее тяжелых климатических условиях работают лишь элементы систем, располагаемых на открытом воздухе. К этой группе можно отнести, например, следящие системы, обеспечивающие слежение за подвижными объектами: следящие системы антенн радиолокационных станций автоматического сопровождения, координаторов и т.п.
Требования к динамике таких систем определяются законом движения цели и условиями получения оптической фильтрации случайной составляющей сигнала. Часто приходится учитывать и значительные возмущения в виде “ветрового момента”.
К наземным подвижным системам предъявляют более жесткие требования по механическим воздействиям, массе и габаритным размерам. Источники питания подвижных систем могут иметь ограниченную мощность и характеристики, изменяющиеся в широком диапазоне.
Характерным примером систем этой группы являются следящие системы подвижных артиллерийских установок. Динамические свойства этих СС определяют в основном исходя из законов движения цели и обеспечения условий наилучшей фильтрации случайной составляющей входного сигнала. Для них характерно наличие больших и быстро меняющихся во времени (ударных) моментов нагрузки.
Для колебательных систем характерна более агрессивная внешняя среда и повышенный уровень механических нагрузок (вибрационных и ударных). Указанные системы объединяет работа при качке и наличии значительного уровня помех во входном сигнале. Кроме того, общим является требование высокого быстродействия при весьма жестких ограничениях габаритных размеров и энергопотребления исполнительных устройств. К этой группе относятся различные приборные СС, а также системы наведения и стабилизации антенны РЛС, орудийных башен, стабилизированных постов и т.д.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.