![]() (11)
(11)
Таким образом, мы получили функционал,
который можно использовать для количественной оценки погрешностей описания
имеющихся у нас измеренных значений ![]() функциями, являющимися
решениями дифференциального уравнения.
функциями, являющимися
решениями дифференциального уравнения.
Как видно из равенства (11), функционал J удовлетворяет равенству ![]() , т.е. является явно заданной и
положительно определенной функцией поправок
, т.е. является явно заданной и
положительно определенной функцией поправок ![]() . Для
этого, как известно из математического анализа, необходимо и достаточно
продифференцировать функционал J по вектору поправок
. Для
этого, как известно из математического анализа, необходимо и достаточно
продифференцировать функционал J по вектору поправок ![]() и приравнять полученные
при этом частные производные к нулю. Выполнив данные операции над функционалом J, получим:
и приравнять полученные
при этом частные производные к нулю. Выполнив данные операции над функционалом J, получим:
Если выполнить все необходимые и вполне очевидные арифметические операции, то данной системе уравнений можно придать следующий, предельно компактный и традиционный в линейной алгебре вид:
![]()
где:
а) ![]()
b)![]() . (12)
. (12)
Здесь ![]() –
квадратная матрица порядка n+1. Как видно из (12b), эта матрица является
симметричной.
–
квадратная матрица порядка n+1. Как видно из (12b), эта матрица является
симметричной.
Полученная система является системой
линейных алгебраических уравнений относительно вектора поправок ![]() . Решение
. Решение ![]() , как
известно, определяется равенством:
, как
известно, определяется равенством:
![]()
Подставляя известные нам величины, получим:
![]() (13)
(13)
В общем виде схема идентификации может быть представлена в виде блок-схемы, представленной на рисунке 13.
![uT
,Λ^T Λ
,Λ^T Δy
,∫
,∫
,∫▒( Λ^T Λ)^(-1)
,[∫▒〖(Λ^T Λ〖)dt]〗^(-1) 〗 ∫▒Λ^T Δydt,Λ,∆y
,Δα](http://files3.vunivere.ru/workbase/00/05/65/76/images/image113.gif) |
Рисунок 13 – Общая схема реализации идентификации
Решение уравнения (13) получено в среде имитационного моделирования MATLAB/Simulink. Схема реализации представлена на рисунке 14.
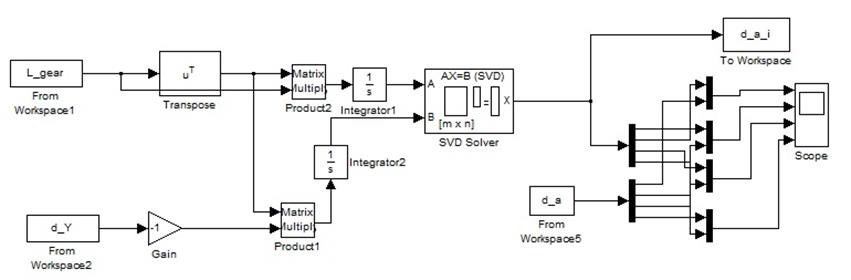
Рисунок 14 – Программная реализация уравнения (13)
Результаты
идентификации при ![]() и синусоидальном задающем воздействии
представлены на рисунке 15.
и синусоидальном задающем воздействии
представлены на рисунке 15.
Теперь проведем оценку погрешности идентификации параметров, используя следующий критерий оценки:
![]() (14)
(14)
Также проведем оценку, обратившись к функционалу (11), который необходимо было минимизировать. Для наглядности рассмотрим как весь функционал целиком, так и входящие в него элементы.
Примем:
![]() (15)
(15)
Тогда:
![]() (16)
(16)
![]() .
(17)
.
(17)
Реализовав оценивание ошибки с помощью данных критериев в среде имитационного моделирования MATLAB/Simulink, доработав схему, предназначенную для решения уравнения (13), получим модель, представленную на рисунке 16.
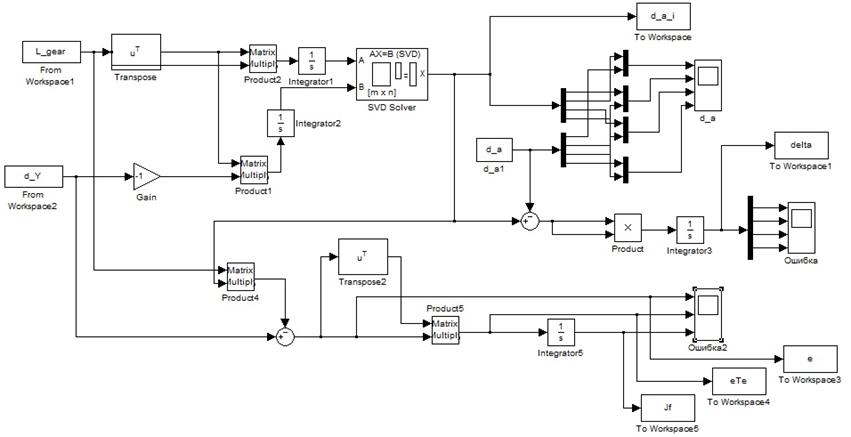
Рисунок 16 – Программная реализация уравнения (13) с критериями оценки
![]()
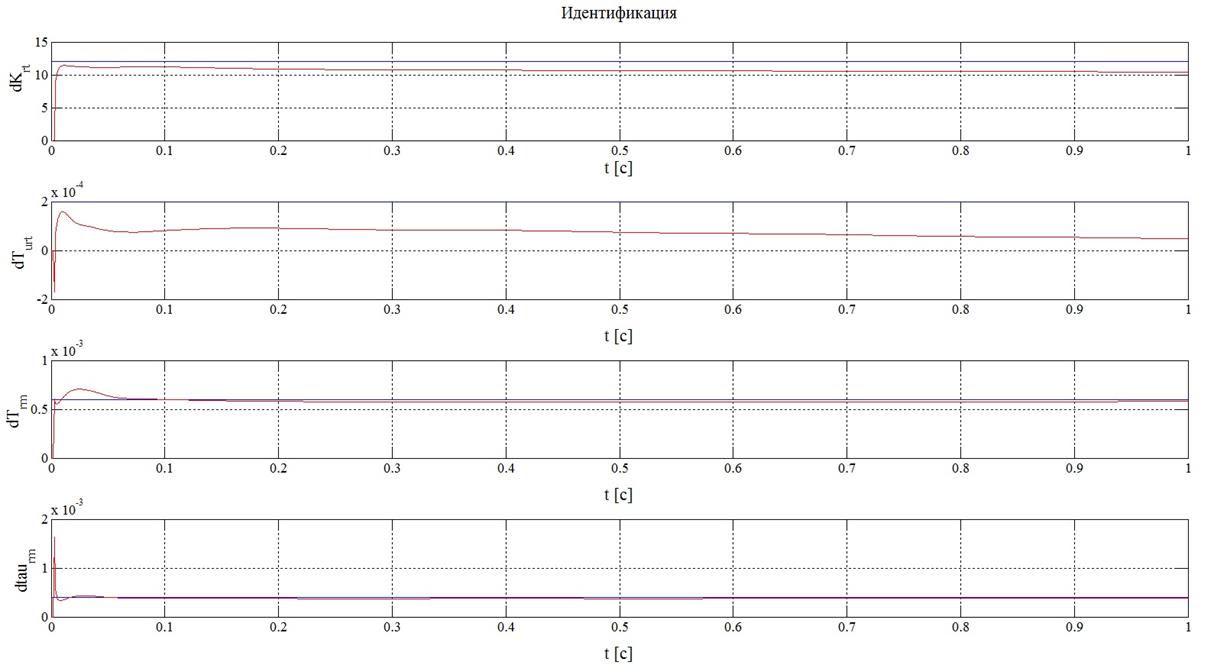
Рисунок 15 – Результаты
идентификации при синусоидальном задающем воздействии и ![]()
На рисунке 17 представлены результаты проведения оценки точности идентификации, проведенной с помощью критерия (14).
Результаты оценки, проведенной с помощью критериев (15), (16) и (17) представлены на рисунке 18, где:
· 1-й график – критерий e;
· 2-й график – критерий eTe;
· 3-й график – критерий Jf.
![]()
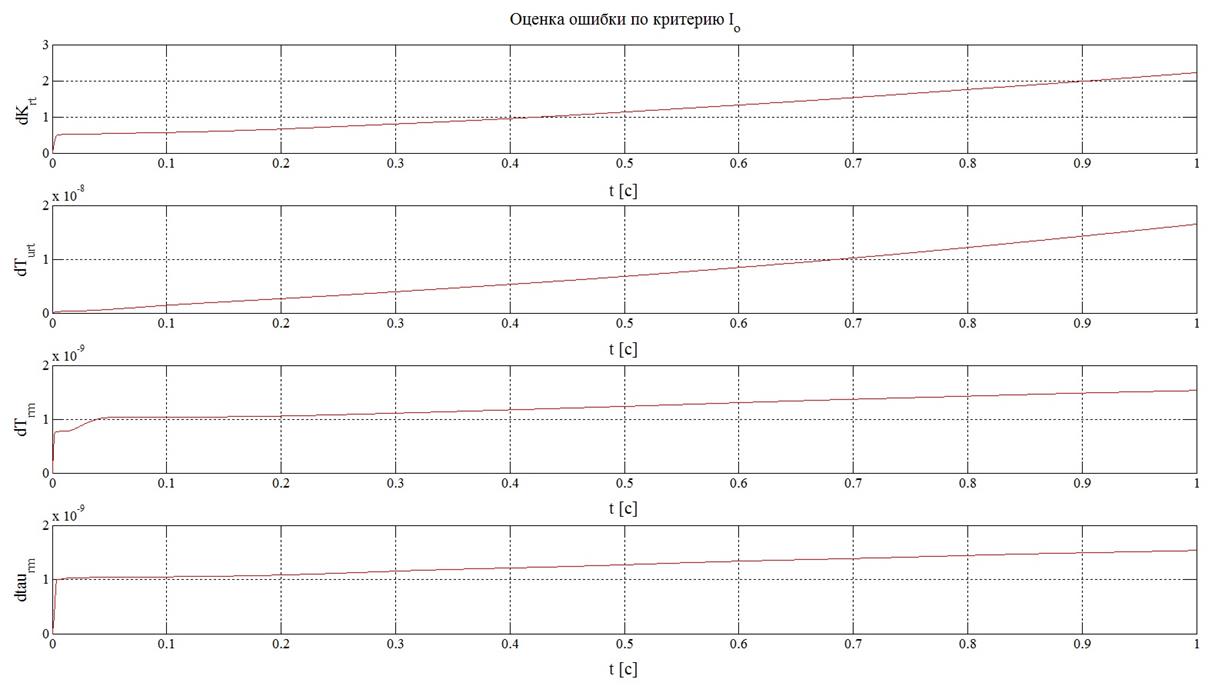
Рисунок 17 – Результаты
оценки с помощью критериев (14) при синусоидальном
задающем воздействии и ![]()
![]()
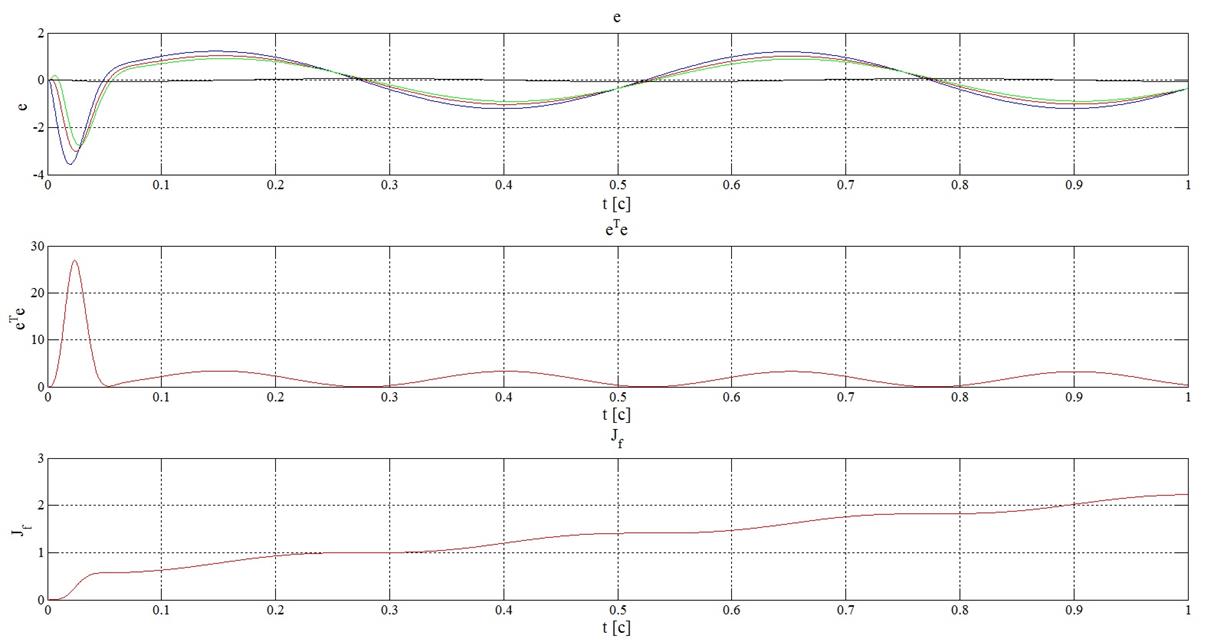
Рисунок 18 – Результаты
оценки с помощью критериев (14), (16) и (17) при
синусоидальном задающем воздействии и ![]()
Теперь в качестве задающего воздействия будем использовать константу. Результаты идентификации представлены на рисунке 19.
Результаты оценки точности с помощью критерия (14) – на рисунке 20.
Результаты, полученные с помощью критериев (15), (16) и (17) – на рисунке 21, где:
· 1-й график – критерий e;
· 2-й график – критерий eTe;
· 3-й график – критерий Jf.
Далее изменим значение ![]() , изменив значение
, изменив значение ![]() на
на ![]() . Измерения проводим для двух
видов задающего воздействия: синусоидальном и равному константе.
. Измерения проводим для двух
видов задающего воздействия: синусоидальном и равному константе.
Результаты
измерений при синусоидальном задающем воздействии представлены ниже. На рисунке
22 изображены графики идентификации параметра ![]() .
Рисунок 23 показывает графики оценки погрешности идентификации с помощью
критерия (14), а рисунок 24 – с помощью критериев (15), (16) и (17).
.
Рисунок 23 показывает графики оценки погрешности идентификации с помощью
критерия (14), а рисунок 24 – с помощью критериев (15), (16) и (17).
В
завершении всего, проведем те же измерения при задающем воздействии, равном
константе. Результаты измерений представлены ниже. На рисунке 25 изображены
графики идентификации параметра ![]() . Рисунок 26 показывает графики
оценки погрешности идентификации с помощью критерия (14), а рисунок 27 – с
помощью критериев (15), (16) и (17).
. Рисунок 26 показывает графики
оценки погрешности идентификации с помощью критерия (14), а рисунок 27 – с
помощью критериев (15), (16) и (17).
Во время данных исследований в функционале (11) на место INподставлялась квадратная матрица с единичной диагональю:
 .
.
Анализируя полученные графики, мы видим, что с течением времени ошибка идентификации увеличивается, что говорит о несовершенстве используемого алгоритма идентификации.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.