последовательного типа и их характеристики представлены в таблице 1. Обобщенная схема пассивного (не содержащего источника энергии) последовательного корректирующего звена показана на рис. 9. Влияние на его характеристики предыдущего и следующего звеньев системы может быть учтено с помощью выходного сопротивления источника сигнала Rи и входного сопротивления следующего звена Rв.
С учетом этих сопротивлений передаточная функция последовательного звена имеет вид:
 , (2.4)
, (2.4)
где Z1(s) и Z2(s) - комплексные сопротивления участков электрической схемы звена.
При выборе элементов системы управления стараются обеспечить Rи достаточно малым, а Rв достаточно большим, чтобы их влияние на характеристики корректирующего звена можно было не учитывать. В этом случае соотношение (2.4) упрощается:
 , и
обеспечиваются лучшие корректирующие свойства.
, и
обеспечиваются лучшие корректирующие свойства.
Следует отметить, что использование некоторых пассивных корректирующих звеньев (например, дифференцирующего из таблицы 1) требует повышения коэффициента усиления разомкнутой системы, иногда - введения дополнительного усилителя.
Параллельные корректирующие звенья используются для введения в закон управления интегралов и производных.
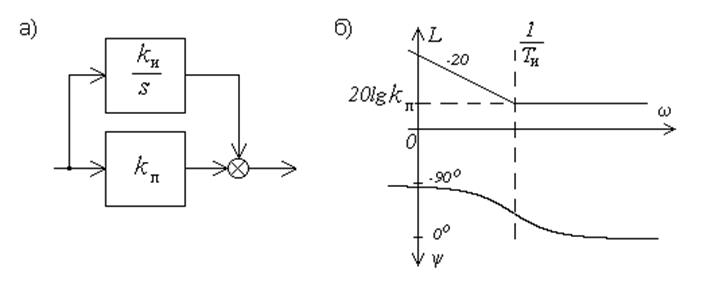
Для повышения порядка астатизма системы используют изодромные устройства, например, показанное на рис. 10. Его передаточная функция и характеристики следующие:
|
Рисунок 10. |
![]() ,
,  ,
,
 ,
,
 ,
,
![]() .
.
Нетрудно убедиться, при достаточно большой величине Tи введение такого устройства в систему позволяет поднять ЛАХ на низких частотах, то есть повысить точность. Дополнительный отрицательный фазовый сдвиг при этом также проявляется только на низких частотах и может лишь незначительно снизить запас устойчивости.
Для повышения запаса устойчивости системы в закон управления может вводиться производная. Это обеспечивается с помощью одного из вариантов параллельных корректирующих устройств, показанных на рис. 11. Могут применяться и более сложные варианты параллельных корректирующих звеньев, передаточные функции которых получаются по соотношениям (2.3).
Для корректирующих обратных связей требуемые передаточные функции также получают на основе (2.3). Кроме того отметим несколько наиболее простых и эффективных видов корректирующих обратных связей, часто применяемых на практике.
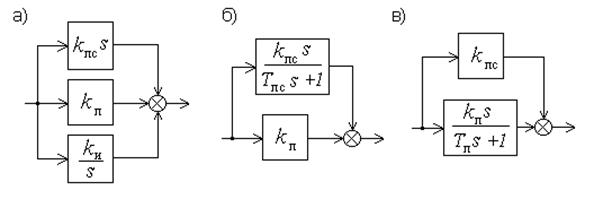
Рисунок 11.
Для снижения инерционности входящего в систему устройства его охватывают жесткой отрицательной обратной связью. Пусть устройство имеет передаточную функцию апериодического звена первого порядка, и его постоянную времени необходимо понизить. После охвата его отрицательной обратной связью с коэффициентом kос будет получена передаточная функция:
 , то
есть постоянная времени и коэффициент передачи уменьшатся в 1+kосkc раз.
, то
есть постоянная времени и коэффициент передачи уменьшатся в 1+kосkc раз.
Астатизм первого порядка по задающему воздействию
может быть обеспечен без введения в систему интегрирующего устройства с помощью
жесткой неединичной отрицательной главной обратной связи с коэффициентом  , где k - коэффициент передачи разомкнутой системы. При этом
немного повышается запас устойчивости.
, где k - коэффициент передачи разомкнутой системы. При этом
немного повышается запас устойчивости.
Для повышения запаса устойчивости системы весьма эффективно введение главной обратной связи по производной:
![]() или
или ![]() , но
техническая реализация такой коррекции возможна, только если обеспечивается
измерение скорости и ускорения выходного сигнала
, но
техническая реализация такой коррекции возможна, только если обеспечивается
измерение скорости и ускорения выходного сигнала
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.