ЛАБОРАТОРНАЯ РАБОТА №3
Исследование процесса двухпозиционного регулирования
1. Цель работы
В результате проведения настоящей лабораторной работы студенты должны уяснить принцип двухпозиционного регулирования, а также методику расчета показателей качества процесса двухпозиционного регулирования по динамическим свойствам объекта.
2. Общие сведения
Вырабатываемые различными типами регуляторов при рассогласовании текущего и заданного значений параметра сигналы позволяют осуществлять различные виды регулирования. В одних системах регулирующий орган перемещается в любое положение в пределах его полного хода и регулирует пропускаемые количества вещества плавно. В других - наиболее простых - регулятор работает так, что регулирующий орган может занимать некоторые фиксированные положения. Например, регулирующая заслонка либо полностью открывается, либо, наоборот, полностью закрывается, т.е. имеет 2 фиксированные позиции. В некоторых случаях целесообразно, с точки зрения ведения процесса, устанавливать регулирующий орган также в промежуточное положение. Например, заслонка, кроме 2-х указанных положений, должна еще иметь возможность открываться наполовину. Число фиксированных позиций в таких случаях больше двух.
Регуляторы, работающие подобным образом, называют в общем случае позиционными, а по количеству позиций их подразделяют на:
а) двухпозиционные (или регуляторы "открыт-закрыт"), б) трехпозиционные, в) многопозиционные,
Двухпозиционные системы регулирования широко используются в практике автоматического регулирования производственных процессов пищевой промышленности: для регулирования температуры, уровня, давления и других технологических параметров. Двухпозиционные автоматические системы регулирования, по сравнению с другими системами регулирования, несложны по конструкции, дешевы, надежны в работе, просто настраиваются и обслуживаются.
Двухпозиционные регуляторы часто встраиваются в базисные приборы: потенциометры, мосты, милливольтметры. В данной лабораторной установке двухпозиционный регулятор встроен в автоматический электронный мост.
В автоматической системе регулирования АСР основными элементами являются регулируемый объект и автоматический регулятор.
Регулируемый объект, который в большинстве случаев является неизменяемой частью, в основном определяют характер всей АСР.
Для правильного выбора регулятора необходимо знать динамику регулируемого объекта, т.е. поведение его при переходе из одного равновесного состояния в другое. Динамические свойства объекта изучены в лабораторной работе 5.
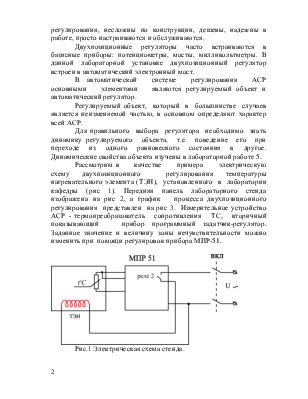
Рассмотрим в качестве примера электрическую схему двухпозиционного регулирования температуры нагревательного элемента (ТЭН), установленного в лаборатории кафедры (рис 1). Передняя панель лабораторного стенда изображена на рис 2, а график процесса двухпозиционного регулирования представлен на рис 3. Измерительное устройство АСР - термопреобразователь сопротивления ТС, вторичный показывающий прибор программный задатчик-регулятор. Заданное значение и величину зоны нечувствительности можно изменить при помощи регулировок прибора МПР-51.
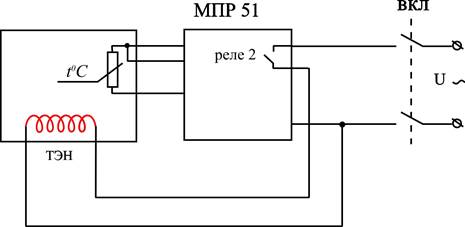
Рис.1 Электрическая схема стенда.
Рис.2 Передняя панель стенда.
При включении установки, если температура ТЭН ниже заданного значения, контакты реле замкнуты (при этом загорается контрольная лампочка), на ТЭН подается напряжение. При повышении температуры она достигает верхней границы зоны нечувствительности и реле размыкает цепь ТЭН (лампочка гаснет). Температура начинает падать. Нагреватель не включен до тех пор, пока температура не упадет ниже нижней границы зоны нечувствительности. После чего контакты реле снова замыкаются на ТЭН подается напряжение и цикл работы системы регулирования повторяется.
Таким образом, процесс регулирования при использовании двухпозиционного регулятора представляет собой колебания регулируемой величины вокруг заданного значения (так называемые автоколебания). Качество такого процесса оценивается амплитудой ya и периодом T. Их значение зависит от динамических свойств объекта регулирования, зоны нечувствительности регулятора, величины регулирующего воздействия.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.