Потокозчеплення визначені як добуток струмів на відповідні індуктивності і взаємоіндуктивності:
 , (1.2)
, (1.2)
де M і L - відповідні індуктивності і взаємоіндуктивності.
Для спрощення моделювання цієї системи можна об'єднати струми фаз і роторних обмоток в п’ятивимірний вектор, тоді кожне з рівнянь буде скалярним добутком цього вектора на інший вектор, що складається з індуктивності і взаємоіндуктивностей.

Рисунок 1.2 – Система (2) у пакеті simulink
Елемент Dot Product - реалізує скалярний добуток векторів, при цьому сигнали, об'єднані за допомогою елементу Mux, автоматично вважаються векторами.
У машині, що обертається, тільки взаємоіндуктивності між ротором і статором залежать від положення ротора щодо обмоток статора і, отже, є функціями часу. Решту L і М можна вважати незмінною.
 ; (1.3)
; (1.3)
 . (1.4)
. (1.4)
Тут блоком constant заданий вектор кутів, при яких відповідні індуктивності максимальні. При проведенні математичних операцій з вектором всі операнди-числа при необхідності автоматично перетворяться у вектора цієї ж розмірності, так що збільшення до вектора число, використовуючи суматор, коректно. Таким же чином можна побудувати підсистеми для розрахунку взаємоіндуктивностей.
Складові індуктивностей можна виразити через індуктивності, якими зазвичай характеризується синхронна машина:
 ; (1.5)
; (1.5)
 . (1.6)
. (1.6)
Модель генератора можна скласти як підсистему, що складається з описаних вище підсистем.
При цьому вихідними параметрами моделі буде напруга у фазах. Вхідними параметрами напруги будуть струми у фазах. Залежність струмів від напруги визначатиметься режимом роботи енергосистеми, модель режиму роботи розташовуватиметься поза моделлю генератора. Ця залежність дасть три відсутніх умови для однозначного вирішення систем рівнянь (1.1) і (1.2).
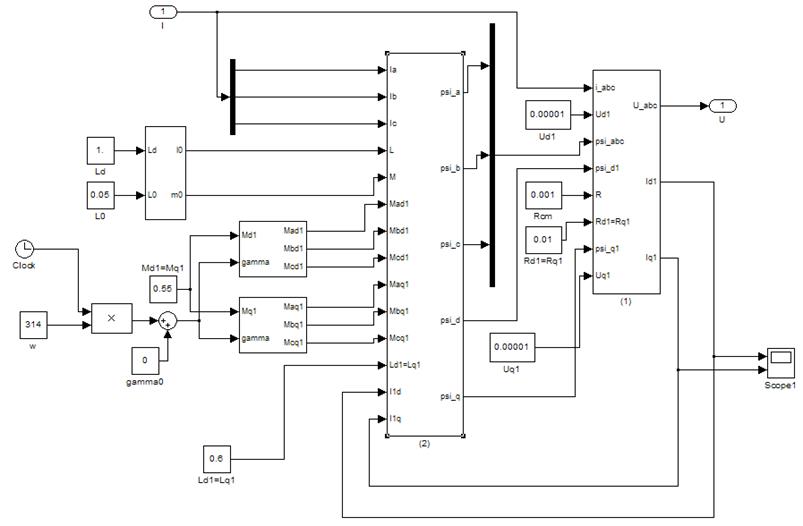
Рисунок 1.3 – Модель асинхронного генератора
2 ДОСЛІДЖЕННЯ АСИНХРОННОГО ГЕНЕРАТОРА
У АВТОНОМНОМУ РЕЖИМІ
2.1 Загальні положення
Дослідження проводилися при наступних допущеннях:
- не враховувалося насичення магнітної системи асинхронної машини, тому сталий режим не наступав, і фіксувався тільки факт відсутності або появи самозбудження;
- враховувався вплив на параметри режиму самозбудження тільки одного чинника, інші при цьому вважалися постійними. Наприклад, змінювали ємність, а частота обертання ротора, активний і індуктивний опори зовнішнього ланцюга статора не змінювалися;
- розрахунок проводився у відносних одиницях.
АГ працює у автономному режимі коли до його шин підключається лише ізольоване навантаження, тобто він не має зв'язку з системою. В цьому режимі струм у ланцюгах генератора та навантаження з'являється за рахунок процесу самозбудження. Одна із умов виникнення самозбудження – наявність залишкової індукції у роторі. У математичній моделі залишкова індукція у роторі моделюється поданням на ротор невеликої напруги, значення якої дорівнює 0,00001. Для цього використовується елемент Constant.
Для виникнення
самозбудження також необхідно обертання ротора з частотою, близькою до
номінальної. У математичній моделі це досягнуто за рахунок моделювання змінних
у часі взаємоіндуктивностей ![]() та
та ![]() , які змінюються відповідно по
косинусоїдальному та синусоїдальному законам з частотою 314. Схема що моделює
змінні взаємоіндуктивності, приведена на рисунку 2.1:
, які змінюються відповідно по
косинусоїдальному та синусоїдальному законам з частотою 314. Схема що моделює
змінні взаємоіндуктивності, приведена на рисунку 2.1:
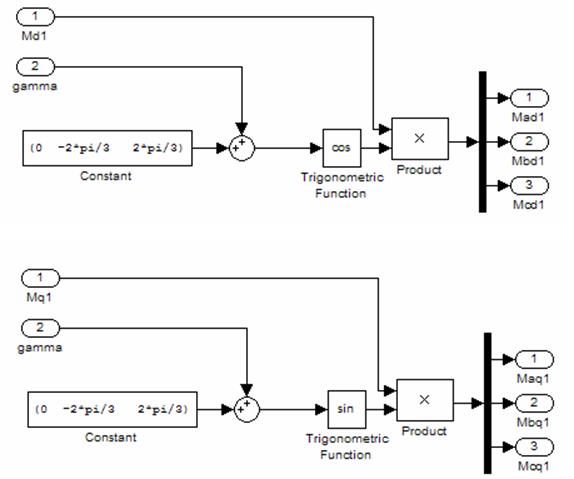
Рисунок 2.1 – Схема що моделює змінні взаємоіндуктивності
Результати досліджень показані на трьох осцилограмах: вихідного струму у фазі А, вихідної напруги тієї ж фази, а також струмів ротору, які виводились на одну осцилограму.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.