2 МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ ЭЭС
2.1 Уравнение турбины и регулятора скорости турбины
Основное назначение моделей турбин в расчётах состоит в
отображении влияния систем регулирования частоты на мощность турбины ![]() при значительных изменениях частоты
вращения. Модели паровых турбин обычно основаны на допущении о неизменности давления
пара перед регулирующими клапанами. Регулирования режима котла, таким образом,
не учитываются. Этим определяется образ применения модели регулирования паровой
турбин: она пригодна для расчётов тех переходных режимов, в которых с момента изменения
частоты проходит не более 5 – 10с. Если же режим работы генератора с
существенно изменившейся мощностью продолжается большее время (например, в
случае длительного дефицита мощности в энергосистеме), то существенно влияние
главного регулятора котлоагрегата. Без такого регулирования
паропроизводительность котла не изменилась бы и, следовательно, нужный режим
мог бы быть обеспечен только кратковременно, за счет инерционности котла.
при значительных изменениях частоты
вращения. Модели паровых турбин обычно основаны на допущении о неизменности давления
пара перед регулирующими клапанами. Регулирования режима котла, таким образом,
не учитываются. Этим определяется образ применения модели регулирования паровой
турбин: она пригодна для расчётов тех переходных режимов, в которых с момента изменения
частоты проходит не более 5 – 10с. Если же режим работы генератора с
существенно изменившейся мощностью продолжается большее время (например, в
случае длительного дефицита мощности в энергосистеме), то существенно влияние
главного регулятора котлоагрегата. Без такого регулирования
паропроизводительность котла не изменилась бы и, следовательно, нужный режим
мог бы быть обеспечен только кратковременно, за счет инерционности котла.
При работе регулятора давления пара «до себя», который поддерживает неизменным давление пара за котлом, снижается влияние процессов в энергосистеме на режим работы блока. В случае возникновения, например, дефицита мощности в энергосистеме и понижения частоты действие регулятора скорости вызывает увеличения открытия регулирующих клапанов и рост мощности турбины. Но при этом из-за увеличения расхода пара его давление на входе в турбину снижается и регулятор «до себя», восстанавливая заданную величину давления, уменьшает открытие регулирующих клапанов, после чего мощность снижается до исходной величины. Набор генератором дополнительной нагрузки при возникновении в энергосистеме дефицита мощности оказывается при таком регулировании кратковременным.
Таким образом, регулятор давления пара «до себя», действуя встречно по отношению к регулятору скорости, препятствует участию блока в поддержании баланса мощности в энергосистеме. Поддержания давления пара при действии регулятора скорости должно обеспечиваться путем воздействия на изменение паропроизводительности котла. Это регулирование очень медленное и может не учитываться при расчетах динамической устойчивости.
Простейшая модель регулирования паровой турбины с промежуточным
пароперегревателем (рис.2.1)
при постоянстве давления пара после основного пароперегревателя составлена
следующим образом. Регулятор скорости конденсационного агрегата изменяет
открытие регулирующего клапана пропорционально скольжению ротора s, соответственно величине![]() , где
, где ![]() -скольжение,
-скольжение, ![]() -неравномерность регулирования, т.е.
величина обратная статизму регулирования
-неравномерность регулирования, т.е.
величина обратная статизму регулирования ![]() =4,5
=4,5![]() 0,5,
0,5, ![]() =22
=22![]() 2.
2.
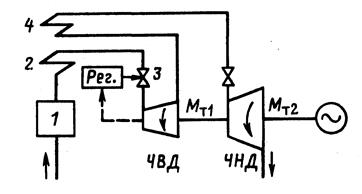
Рисунок 2.1 - Принципиальная схема паровой турбины
1-котел, 2-основной пароперегреватель, 3-регулирующий клапан,
4-промежуточный пароперегреватель.
Механизмы регулятора скорости характеризуются нелинейностью
типа «люфт», которую обычно представляют упрощенно зоной нечувствительности к
малым отклонениям частоты вращения. При этом сигнал регулирования ![]() в начале переходного процесса отличен от
нуля только тогда, когда скольжение
в начале переходного процесса отличен от
нуля только тогда, когда скольжение ![]() становится больше
некоторой величины
становится больше
некоторой величины ![]() примерно равной половине ширины
зоны нечувствительности:
примерно равной половине ширины
зоны нечувствительности:
 (2.1)
(2.1)
обычно
устанавливается ![]()
![]() 0,15 Гц.
0,15 Гц.
Изменения
открытия регулирующего клапана ![]() описывается дифференциальным
уравнением:
описывается дифференциальным
уравнением:
 (2.2)
(2.2)
Где Трс – постоянная времени регулятора скорости.
Открытие регулирующего
клапана![]() ограничено минимальным и максимальным
значениями:
ограничено минимальным и максимальным
значениями:
![]()
Перемещение регулирующего клапана не мгновенно вызывает изменение паровой мощности турбины (необходимо учесть инерционность, паровых объёмов турбины).
Учтем паровые объемы дифференциальным уравнением первого порядка:
 (2.3)
(2.3)
где ![]() - постоянная времени
паровых объёмов турбины,
- постоянная времени
паровых объёмов турбины,
![]() -мощность турбины.
-мощность турбины.
2.2 Уравнение движения ротора генератора
Это уравнение связывает движение ротора генератора с моментом инерции и результирующим моментом, действующим на ротор и определяемый механическим и электрическим моментами:
 (2.4)
(2.4)
где ![]() - постоянная времени
инерции генератора,
- постоянная времени
инерции генератора,
![]() - угол
между вектором ЭДС холостого хода генератора и вектором напряжения приемной
системы.
- угол
между вектором ЭДС холостого хода генератора и вектором напряжения приемной
системы.
В относительных единицах при малых отклонениях угловой скорости
генератора от номинальной можно считать, механический и электрический моменты
равны механической мощности турбины ![]() и электрической мощности
генератора
и электрической мощности
генератора ![]() .
.
Так
как  , то уравнение движения ротора генератора
будет иметь вид:
, то уравнение движения ротора генератора
будет иметь вид:
 (2.5)
(2.5)
где ![]() - отклонение угловой
скорости генератора от номинальной.
- отклонение угловой
скорости генератора от номинальной.
В
уравнении (2.5) время и постоянная инерции имеют размерность сек, ![]() - 1/сек, мощности в относительных
единицах.
- 1/сек, мощности в относительных
единицах.
Мощность
турбины рассчитываем по формуле (2.3), а мощность электрическую принимаем
равной мощности нагрузки ![]() , т.е. не учитываем потери
активной мощности в генераторе и в электропередачи.
, т.е. не учитываем потери
активной мощности в генераторе и в электропередачи.
2.3 Уравнение регулятора частоты
Регуляторы частоты предназначены для восстановления частоты после окончания переходного процесса, вызванного нарушением баланса мощности и действия первичного регулирования частоты. Обеспечение необходимой генерируемой мощности при заданной частоте осуществляется путем смещения регулировочной характеристики автоматического регулятора частоты вращения (АРЧВ), воздействуя на узел начальной установки частоты АРЧВ.
В данной работе регулятор частоты (измерительный орган и усилитель),
действующий на механизм управления турбиной (МУТ), принимаем безынерционным.
Электродвигатель МУТ, представляем одним инерционным звеном с постоянной
времени ![]() . Коэффициент усиления автоматического
регулятора частоты (АРЧ) КАРЧ (1/с) представляет собой
произведение коэффициентов передачи измерительного органа, усилителя,
электродвигателя и собственно МУТ. В относительных единицах он выражает
скорость относительного смещения золотника регулятора турбины при неизменном,
равном единице, отклонении частоты на входе АРЧ. Входной величиной АРЧ является
отклонение частоты
. Коэффициент усиления автоматического
регулятора частоты (АРЧ) КАРЧ (1/с) представляет собой
произведение коэффициентов передачи измерительного органа, усилителя,
электродвигателя и собственно МУТ. В относительных единицах он выражает
скорость относительного смещения золотника регулятора турбины при неизменном,
равном единице, отклонении частоты на входе АРЧ. Входной величиной АРЧ является
отклонение частоты ![]() , а выходом – сигнал
регулирования
, а выходом – сигнал
регулирования ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.