












Министерство высшего образования Российской Федерации
Санкт-Петербургский Государственный Политехнический Университет
Электромеханический факультет
Кафедра “Электрические сети и системы”
Курс “Теория автоматического регулирования”
Пояснительная записка
по курсовой работе
Вариант № 4
Выполнили:
Студенты группы 3023/1
Лукьяненко М.Н.
Шескин Е.Б.
Проверил: Попков Е.Н.
Санкт-Петербург
2006
Параметры нагрузки:C=1000 мкФ,R=1.5 Ом,R0=2.5
Номинальное значение регулируемой переменной в установившемся режиме: I=1000 A
Пункт 1
I.Операторное пространство
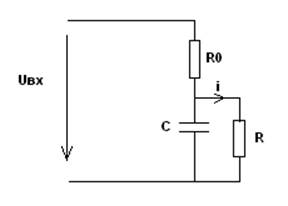 Xвых=i
Xвых=i

2.Физическое пространство.
1)Компонентные уравнения:
2)I закон Кирхгофа

3)II закон Кирхгофа
Пункт 2
Расчёт ЭДС двумя способами:
1 способ:
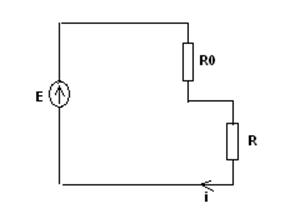
E=i*(R+R0)=100*4=400 B
2 способ:
E(p)=i(p)/W(p)
![]()
Пункт 3
Переходная характеристика инерционного звена первого порядка:
![]()
Это аналитическая переходная характеристика звена, эквивалентирующего нагрузку
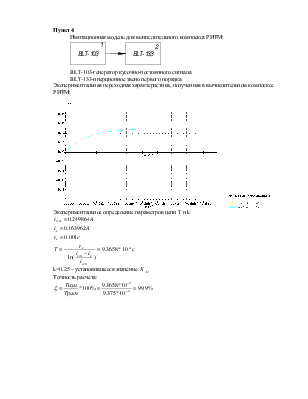
Пункт 4
Имитационная модель для вычислительного комплекса РИТМ:
BLT-103-генератор кусочно-постоянного сигнала
BLT-133-инерционное звено первого порядка
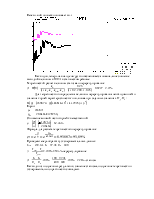
Экспериментальная переходная характеристика, полученная в вычислительном комплексе РИТМ:
Экспериментальное определение параметров цепи T и k:
k=0.25 – установившееся значение ![]()
Точность расчета:

Пункт 5
Для проверки правильности определения ЭДС, зададим входной сигнал, равный величине рассчитанной ЭДС. Таким образом, на выходе мы должны получить номинальный ток в установившемся режиме при правильном расчете. Схема имитационной модели осталась такая же.
На вход подаем ЭДС Е=400 В, получаем ток i=100 А, что соответствует действительности.
Пункт 6
Для экспериментального
определения АФЧХ нам потребуются семь значений ![]() .
Для их определения воспользуемся расчетной АФЧХ инерционного звена 1-го порядка
с нашими параметрами.
.
Для их определения воспользуемся расчетной АФЧХ инерционного звена 1-го порядка
с нашими параметрами.
Для ее построения воспользуемся следующими формулами:
 ;
; ,
где k=0.25, T=0.0009375
,
где k=0.25, T=0.0009375
 ,
,
где X(ω), Y(ω) – соответственно вещественная и мнимая части функции W(jω).
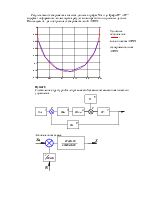
Эта зависимость имеет вид:
Воспользовавшись функцией трассировки данных, доступной в математическом пакете MathCAD 11, получим семь значений X(ω):
Выразив ω через X, найдем искомые семь значений ω для снятия экспериментальной АФЧХ.
Проведя расчет в математическом пакете MATLAB 6.5, получим:
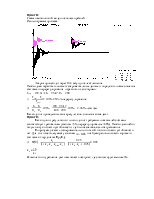
Для проверки подставим эти значения в выражения для X(ω) и Y(ω) и построим
полученную зависимость:
 Условные обозначения:
Условные обозначения:
![]() -
аналитическая АФЧХ
-
аналитическая АФЧХ
![]() -
проверочная АФЧХ
-
проверочная АФЧХ
Таким образом, видно, что полученные значения ω истинны.
На основании этих данных заполним таблицу:
|
№ опыта |
ω, рад/с |
f, Гц |
T, c |
Tок, c |
Тга, с |
Xm |
φ, рад |
W' |
W'' |
|
1 |
167,3 |
26,626622 |
0,037556 |
0,2253 |
0,1878 |
0,24698 |
-0,156 |
0,2440 |
-0,0383 |
|
2 |
331,3 |
52,728033 |
0,018965 |
0,1138 |
0,0948 |
0,23875 |
-0,301 |
0,2280 |
-0,0708 |
|
3 |
592,8 |
94,34705 |
0,010599 |
0,0636 |
0,0530 |
0,21851 |
-0,507 |
0,1910 |
-0,1062 |
|
4 |
1000,5 |
159,234521 |
0,006280 |
0,0377 |
0,0314 |
0,18233 |
-0,753 |
0,1330 |
-0,1247 |
|
5 |
1569,3 |
249,761852 |
0,004004 |
0,0240 |
0,0200 |
0,14054 |
-0,973 |
0,0791 |
-0,1162 |
|
6 |
2784,1 |
443,103277 |
0,002257 |
0,0135 |
0,0113 |
0,08944 |
-1,205 |
0,0320 |
-0,0835 |
|
7 |
6628,8 |
1055,006287 |
0,000948 |
0,0057 |
0,0047 |
0,03968 |
-1,41 |
0,0064 |
-0,0392 |
Помимо этих, есть еще две величины, не представленные в таблице по той причине, что они остаются одинаковыми для всех опытов. Эти величины:
τ = 0.0009375 с
2. h – шаг расчета, с
h = ![]() c
c
Пункт 7
Эти данные позволят нам смоделировать эксперимент по снятию АФЧХ инерционного звена 1-го порядка в вычислительном комплексе РИТМ. Сущность эксперимента состоит в том, что мы будем подавать на вход звена гармонический сигнал с разными частотами ω (см. таблицу), и нулевой начальной фазой. Регистрируя амплитуду выходного сигнала и разность фаз входного и выходного сигналов, мы получим данные, необходимые нам для построения экспериментальной АФЧХ.
Схема имитационной модели имеет вид:
BLT-091-генератор гармонического сигнала
BLT-133-инерционное звено первого порядка
Вид входного и выходного сигналов
для сдвига фаз ![]()
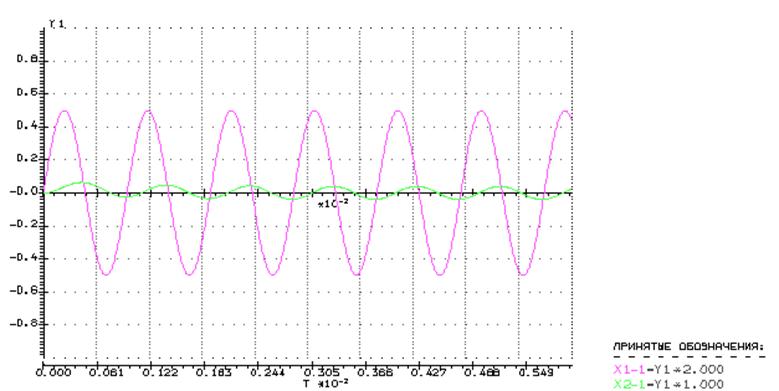
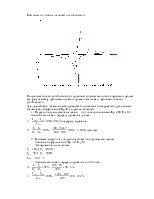
Результатами эксперимента являются данные в графах Xm и φ. Графы W’ и W’’ содержат информацию, являющуюся результатом обработки полученных данных. Используем их для построения экспериментальной АФЧХ:
Условные обозначения:
![]() -
аналитическая АФЧХ
-
аналитическая АФЧХ
![]() -
экспериментальная АФЧХ
-
экспериментальная АФЧХ
Пункт 8
Составление структурной алгоритмической схемы системы автоматического управления.
Эквивалентная схема:
1)входной сигнал E0
2)входной сигнал Xуст

Из выражений видно, что, независимо от входного сигнала(E0 ,Xуст), характеристический полином в знаменателе остаётся неизменным.
![]()
![]()
Пункт 9
Для определения границы устойчивости существует 3 математических условия:
![]() -свободный
член характеристического полинома равен нулю.
-свободный
член характеристического полинома равен нулю.
2)![]() -коэффициент
при старшей степени равен нулю.
-коэффициент
при старшей степени равен нулю.
3)![]() -предпоследний
определитель матрицы Гурвица равен нулю.
-предпоследний
определитель матрицы Гурвица равен нулю.
В нашем случае из этих трех условий мы можем реализовать только 1) и 3), т.к. а0 не зависит от Кр и Кд.
Рассмотрим первое математическое условие:
Рассмотрим второе математическое условие:
Область устойчивости
Пункт 10
По указанию преподавателя из
области устойчивости мы выбрали ![]()
Произведем проверку точки на устойчивость критерием устойчивости Гурвица.
Условия устойчивости:
Положительность определителя Гурвица и всех его диагональных миноров, т.е. должны выполняться следующие условия:
В нашем случае получили:
Таким образом, выполняются все условия устойчивости по Гурвицу, следовательно система при выбранных настройках будет работать устойчиво.
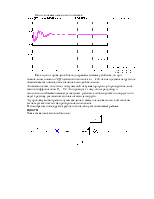
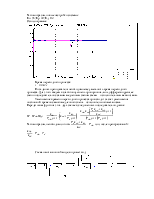
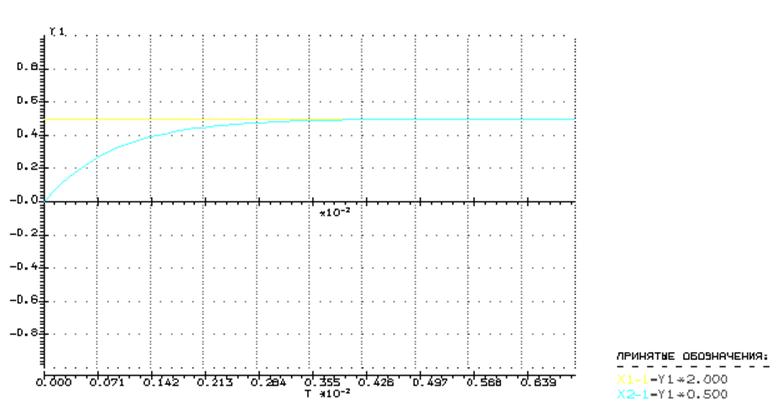
Осциллограмма переходного процесса:
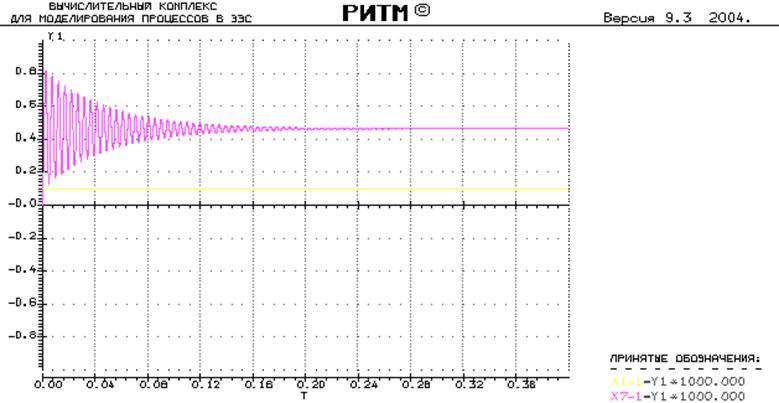
Как видно из приведенной
осциллограммы, система устойчива, но при номинальном значении ЭДС основного
источника ![]() на выходе звена нагрузки не
обеспечивается номинальное значение выходной величины.
на выходе звена нагрузки не
обеспечивается номинальное значение выходной величины.
Это связано с тем, что сигнал, поступающий на сумматор
проходит пропорциональное звено с коэффициентом ![]() Это
приводит к тому, что на регулятор и исполнительный механизм всегда поступает
разность сигналов уставки и нагрузки, что ведет к резкому увеличению сигнала на
выходе нагрузки.
Это
приводит к тому, что на регулятор и исполнительный механизм всегда поступает
разность сигналов уставки и нагрузки, что ведет к резкому увеличению сигнала на
выходе нагрузки.
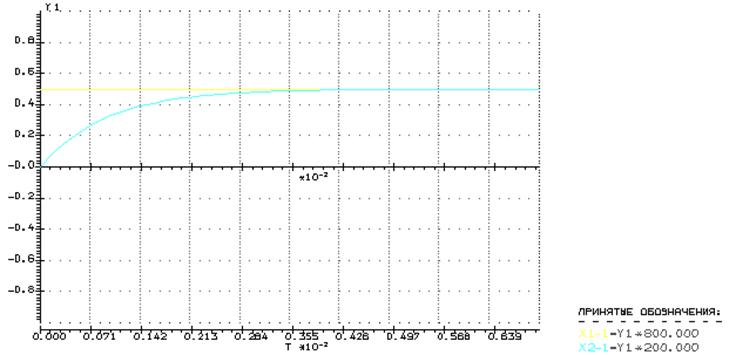
Эту проблему можно решить путем введения в схему последовательно с источником сигнала уставки такого же пропорционального звена.
Таким образом, нивелируется разность сигналов в установившемся режиме.
Пункт 11
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.